
Kamini Jaipal-Jamani, Brock University, Canada
Integrating STEM education within the elementary school science curriculum in Ontario, Canada, elevated the expectation for elementary preservice teachers to teach STEM skills such as problem-solving through coding. Research shows that educational robotics can promote STEM knowledge and skills. This mixed methods study investigates the effect of an educational robotics intervention on preservice teachers’ STEM problem-solving skills and their self-efficacy to teach with educational robotics during the COVID-19 pandemic. Data sources included a pre- and post questionnaire on problem-solving, a pre- and post- self-efficacy teaching questionnaire, a problem-solving worksheet, and transcripts of group interactions. Quantitative findings were statistically significant for preservice teachers’ self-efficacy to teach with educational robotics (large effect size) and for problem-solving competencies (small effect size). Using a STEM problem-solving framework, two preservice teacher group interactions were analysed. Qualitative findings indicated that preservice teachers exhibited similar problem-solving processes as STEM experts, but preservice teachers’ prior STEM knowledge limited the types of decisions considered at the problem-solving stages. The study provides an example of how preservice teachers’ self-efficacy to teach with educational robotics was developed within a science education course and lends unique insights into the problem-solving processes these preservice teacher groups engaged in.
Keywords: educational robotics, preservice teachers, self-efficacy, STEM, problem-solving skills
Avec l’intégration de l’enseignement des STIM dans le programme de sciences de l’école primaire en Ontario, au Canada, les futurs enseignants devront s’attendre à enseigner des compétences en lien avec la programmation informatique et la résolution de problèmes. La littérature scientifique montre que la robotique éducative peut favoriser l’acquisition de connaissances et de compétences dans le domaine des STIM. Cette étude à méthodes mixtes porte sur l’effet d’une intervention en robotique éducative sur les compétences en résolution de problèmes dans les STIM chez des enseignants en formation et sur leur auto-efficacité vis-à-vis de la robotique éducative pendant la pandémie de COVID-19. Les sources de données comprenaient des questionnaires sur les processus de résolution de problèmes et sur l’auto-efficacité relative à l’enseignement, une feuille de travail sur la résolution de problèmes et des transcriptions des interactions au sein du groupe. Les résultats quantitatifs étaient significatifs d’un point de vue statistique en ce qui concerne l’auto-efficacité des enseignants en formation initiale relativement à la robotique éducative (taille de l’effet forte) et leurs compétences en matière de résolution de problèmes (taille de l’effet faible). Les interactions de deux groupes d’enseignants en formation initiale ont été analysées selon un cadre de résolution de problèmes propre aux STIM. Les résultats qualitatifs indiquent que les processus de résolution de problèmes des enseignants en formation initiale sont similaires à ceux des experts en STIM, mais que les connaissances préalables de ces enseignants en STIM ont eu pour effet de limiter les types de décisions prises lors des étapes de résolution de problèmes. L’étude montre de quelle façon l’auto-efficacité de futurs enseignants vis-à-vis de la robotique éducative a évolué dans le cadre d’un cours de science et donne un aperçu unique des processus de résolution de problèmes que ces groupes d’enseignants en formation ont mis en œuvre.
Mots clés : auto-efficacité, compétence en résolution de problèmes, futurs enseignants, robotique éducative, STIM
Rapid technological advancements have resulted in new and emerging STEM fields, like robotics engineering, which underline the need for skills such as critical thinking and complex problem-solving (OECD, 2023). Educational robotics (ER) can provide opportunities for school students to learn not only STEM concepts (Anwar et al., 2019; Park, 2015), but also ER can develop their confidence, interest, and participation in the STEM fields (Hudson et al., 2020; Miller et al., 2018) and help them develop problem-solving skills such as computational thinking (Zhang et al., 2021). Robotics programs have been commonly implemented by informal organisations, like science centres, as after-school programs (Nugent et al., 2012; Williams et al., 2008) and as robotics competitions (Chung et al., 2014; Karp & Maloney, 2013). Altin and Pedaste (2013) purport that to engage all learners and not just a small group of learners through robotics competitions, robotics should be included in the curriculum both “as a learning object and [as a] tool to learn other subjects” (p. 366). As a learning object, robotics is used to learn about how robots function and how to program them and the latter concepts are normally taught in technological subjects in secondary schools (Ontario Curriculum and Resources, 2009). Robotics as a tool can be used in many subjects to support learning—for example, learning the different principles of motion in physics (Altin & Pedaste, 2013).Traditionally, the use of ER in formal elementary education has been limited in scope with few teachers employing ER to support students’ learning of programming knowledge and skills such as problem-solving and collaboration (Aurini et al., 2017; Darmawansah et al., 2023) or using it to develop confidence and interest in STEM subjects and careers (Hudson et al., 2020; Park, 2015). The informal integration of ER by teachers does not facilitate consistent and widespread use of robotics as an object and a tool in schools, and hence to reap the benefits there is a need for formal curricular integration of ER and coding in elementary schools for all students.
In Ontario, the revised version of the elementary Science and Technology curriculum emphasises the development of STEM process skills, specifically through scientific experimentation, scientific research and engineering design processes, and the development of global competencies including collaboration and digital literacy (Ontario Curriculum and Resources, 2022). With this formal curriculum emphasis, teachers are expected to know how to use technologies like ER and online programming applications (e.g., Scratch) in science and technology learning contexts. With a view to this curriculum revision, this paper reports on a study in a Science and Technology methods course in a Bachelor of Education program that occurred during the COVID-19 pandemic. The study investigated the effect of an ER activity on preservice teachers’ (PTs’) STEM problem-solving skills and their self-efficacy to teach with ER. Prior to COVID-19, PTs worked in groups of five or more due to the limited number of robotics kits available because of the high cost of purchasing these kits. However, face-to-face classes during the pandemic required stringent safety protocols be put in place. Hence, PTs, wearing masks, worked in smaller groups of twos and threes. These instructional experiences led to some changes to how the ER activity was implemented post-pandemic (discussed at the end of the paper). Results of this study can be used to inform the development of course activities for preservice science and technology methods courses and may support the design of new courses on ER and coding in teacher education. The results contribute to the literature on effective pedagogy for teaching STEM problem-solving skills and provide insights on how problem-solving skills were developed by elementary PTs during ER activities.
Since the study investigated how ER promoted self-efficacy and problem-solving during preservice teacher participation in an ER activity, literature related to the three constructs (italicised) and in relation to PTs are reviewed.
Educational robotics has been incorporated in school learning in various ways over the last 20 years, propelled by the development of robotics kits, like LEGO® Mindstorms, for the masses (Anwar et al., 2019). Robotics is a learning tool that lends itself to experiential and student-centred approaches because it is a concrete manipulative that children interact with and explore while solving real-world problems and constructing knowledge (Eguchi, 2021; Glezou, 2021). In K-12 learning environments, ER use includes robotics kits, programming software, and computers being used as hands-on learning tools to support problem-solving, critical thinking, collaboration, and learning of abstract concepts and ideas (Eguchi, 2021). Studies show that ER activities provide opportunities for students to apply knowledge and skills from many of the STEM disciplines as they problem-solve (Ching et al., 2019; Siverling et al., 2018) and promote the development of collaboration and problem-solving skills (Nemiro, 2021; Taylor & Baek, 2018). Educational robotics is therefore suitable for developing 21st century competencies such as critical thinking and innovation (cognitive competencies), communication and collaboration (interpersonal competencies), and initiative and metacognition (intrapersonal competencies), as well as STEM literacy (National Research Council, 2014). According to Bybee (2013), STEM literacy includes asking questions, solving problems, explaining phenomena, and understanding how to use inquiry and design.
Robotics-based activities are particularly suited to developing scientific inquiry and engineering design skills such as posing questions and constructing explanations (scientific inquiry skills) and defining problems and constructing prototypes of products (engineering design skills; National Research Council, 2012). LEGO® Robotics in middle schools has been used to develop and reinforce math concepts, the scientific and engineering design process, programming, problem-solving, and teamwork (Benitti, 2012). With respect to engineering design, when students construct and program robots, they define the engineering problem (e.g., how does the robot work to solve the problem?), propose the solution to the problem (e.g., how to build the robot), and consider optimisation (e.g., how to improve the efficiency of the robot to complete the task) (Ziaeefard et al., 2017). Research suggests that ER supports student learning of concepts and skills in the STEM areas in both formal and after-school or extracurricular contexts (Anwar et al., 2019; Williams et al., 2008). However, there were mixed findings reported about the impacts of robotics on science and math attitudes and learning. For example, in a mixed methods study, Ching et al. (2019) found, among 18 Grade 4–6 students participating in a STEM, project-based learning robotics curriculum conducted over eight weeks in an after-school program, no statistically significant improvement in attitudes towards science, engineering, and technology but results were significant for mathematics attitudes. In another mixed methods study (Sáez-López et al., 2019) with 93 middle school students doing Scratch coding integrated into a math and science unit, results showed improved comprehension of math and programming concepts but not for science concepts. Some of these mixed results may be due to challenges students experienced such as complicated designs, missing robot parts, visuals and written guides that were hard to follow (Ching et al., 2019; Kopcha et al., 2017), and challenges linked to teacher training (Sáez-López et al., 2019), especially teachers’ lack of knowledge and experience with coding and programming (Kopcha et al., 2017). Other challenges reported by teachers were that science standards were not emphasised as much as math and engineering in the robotics activities, with teachers calling for stronger connections made to science curriculum standards (Kopcha et al., 2017). The National Research Council (2014) also noted that the success of STEM learning “depends on the approach to integration and the kinds of supports that are embedded in the experience and provided through instruction” (p. 3). Therefore, besides knowledge of pedagogical approaches such as engineering design, teachers need to know how to incorporate strategies like peer collaboration and scaffolds to make STEM connections explicit, as these strategies help students succeed at challenging STEM tasks (National Research Council, 2014). This current study also provides insights into the instructional scaffolds used to support PTs to learn how to develop STEM skills by means of ER in the classroom.
Teacher self-efficacy or confidence in their ability to plan and implement learning experiences is an important factor that contributes to effective teaching (Darling-Hammond & Baratz-Snowden, 2007; Nolan & Molla, 2017). Self-efficacy beliefs play a significant role in how people are motivated, make choices, and behave in specific settings. Self-efficacy, as explained by Bandura (1994), indicates a person’s belief in his or her capability to carry out actions or complete a task to produce specific outcomes and it includes a judgment regarding how well he or she can perform the task or action and his or her confidence in having the skills to do the task or action. Four ways have been suggested to develop a person’s self-efficacy: 1) mastery experiences which involve direct experience with and successful completion of the action or task; 2) vicarious experiences through observing social role models successfully complete a task; 3) social persuasion through positive verbal feedback; and 4) emotional and physiological states that are managed to reduce stress reactions (Bandura, 1994). Studies on how these strategies affect teachers show that some strategies are more effective than others at developing teacher self-efficacy. For example, while vicarious experiences such as modeling (e.g., observing another person teach) and enactive mastery (that is, perceived successes in prior teaching) enhance self-efficacy among elementary science teachers, it was cognitive mastery of pedagogical content knowledge and verbal persuasion through in-situ feedback that were more effective (Palmer, 2011). Velthuis et al. (2014) also reported that it was the practical experiences of PTs teaching science to students in the classroom that most impacted their self-efficacy beliefs about teaching science. The role played by subject-matter knowledge on teacher self-efficacy in general suggests that there was a relationship between subject-matter knowledge and self-efficacy (Rohaan et al., 2012).
With respect to technology integration, studies (e.g., Lemon & Garvis, 2016) show that many PTs do not feel confident about integrating technology in general into teaching practice. A few studies on PTs’ self-efficacy to teach with robotics in instructional technology courses (Fegely & Tang, 2022; Kucuk & Sisman, 2018; Piedade et al., 2020) reported that PTs were motivated to teach programming to students after the ER course experiences. Findings by Piedade et al. (2020) suggested that collaborative, problem-solving activities such as planning, designing, and implementing scenarios with robots contributed to PTs’ confidence to teach with robotics. Some studies have explored how ER can be integrated in science education courses to develop PT self-efficacy to teach programming and develop computational thinking skills (Jaipal-Jamani & Angeli, 2017; Kaya et al., 2017; Schina et al., 2021). Schina et al. (2021) reported on PTs in the Spanish context and the study by Kaya et al. (2017) was in a US context. The current study adds to the literature on PT self-efficacy to teach with robotics in elementary science in a Canadian context.
With recent curricular emphasis on learning STEM skills to deepen the understanding of fundamental concepts such as automation (new addition) in the Ontario elementary Science and Technology curriculum (Ontario Curriculum and Resources, 2022), it is an expectation that elementary school students engage in instructional activities that develop STEM problem-solving processes such as inquiry, engineering design, and computational ways of thinking (e.g., leaning how coding controls automated systems). The OECD (2015) also emphasised collaboration as an important aspect of the problem-solving process whereby two or more persons “attempt to solve a problem by sharing the understanding and effort required to come to a solution and pooling their knowledge, skills and efforts to reach that solution” (p. 6). While some problem-solving skills may be unique to individual STEM disciplines, for example, constructing prototypes in engineering, Price et al. (2021) found that scientist and engineer experts in STEM fields including biology, medicine, physics, chemistry, engineering, and computer science made common decisions during problem-solving. The authors therefore proposed a STEM problem-solving model consisting of six general categories: selection and goals of the problem; frame the problem; plan the process for solving; interpret information and choose solutions; reflect; and implications and communication of results. They also detailed a number of decisions made in each category (Table 1).
Table 1
Decisions Made by STEM Experts at Each Problem-Solving Category (Price et al., 2021)
| Problem-solving category | Decisions made |
| Selection and goals of the problem |
What are goals, design criteria, requirements of problem or the solution; scope of the problem; constraints on solution; and criteria to evaluate solution? |
| Frame the problem |
|
| Plan the process for solving |
|
| Interpret information and choose solution(s) |
|
| Reflect |
|
| Implications and communication of results |
|
Since ER incorporates the application of knowledge and processes from the STEM disciplines during problem-solving (Ching et al., 2019; Siverling et al., 2018), the STEM problem-solving model described in Table 1 was used to analyse PTs’ development of problem-solving skills during the ER activity.
A mixed methods study (Creswell & Plano Clark, 2017) was conducted to investigate the following questions:
A quasi-experimental, one-group, pre- post-test design was implemented to determine research questions 1 and 2 as it was not possible to randomly assign participants to groups (Privitera & Ahlgrim-Delzell, 2018). Concurrently, to provide a rich, in-depth description of the problem-solving process experienced during the robotics tasks, selected group interactions were observed and audiotaped.
The study participants were PTs in the first year of a Bachelor of Education program being certified to teach junior/intermediate science for Grades 4–10. The majority of PT participants were non-science, undergraduate majors from three class sections of a Science and Technology methods course. The robotics activities were implemented as part of the course curriculum. Since PTs were in pre-assigned sections of courses, the study sample was a convenience sample. Ethics consent was obtained from the University and, to minimise conflict of interest, a research assistant invited PTs to participate in the study. Participation in the research components was voluntary and did not contribute to course grades. A total of 57 PTs provided their consent. However, the total number of participants who completed both pre- and post-data instruments was 36. For the qualitative analysis, two groups consisting of two and three PT participants, respectively, were selected on the audibility and succinctness of the transcripts to showcase the similarities and differences in the problem-solving processes and having a complete set of data for triangulation purposes.
The robotics activities were facilitated by the author in all three class sections during a 3-hour class session in week 9 of the 12-week course during Winter 2022. The author was the instructor for one section only. Pre-instruments were completed at the beginning of the ER activity session and post-instruments were completed two weeks after the ER activity session. During the ER session, data were collected by the research assistant. In the classes prior to and after the robotics activity, PTs were exposed to topics that included the science and technology curriculum structure and content, unit planning approaches, assessments in science, nature of science, environmental education, cross-curricular language and Indigenous connections, and hands-on workshops such as on electrical circuits. Preservice teachers also conducted science demonstrations to teach a concept, however they did not experience any type of problem-solving activities involving robotics and coding. As well, PTs were asked about their prior knowledge of robotics for use in teaching and learning on a pre-questionnaire; 17% (6 PTs) felt they had sufficient prior knowledge of ER. The goals for this robotics activity were consistent with the expectations of the Ontario Science and Technology curriculum which was to promote the development of STEM skills, particularly coding, problem-solving, and teamwork, and to deepen understanding of how coding controlled automated systems. Preservice teachers used LEGO® EV3 Mindstorms robotics kits and downloaded the coding software onto their personal computers. During this process, some PTs did experience technical issues. Specific STEM skills addressed in the ER activity included creating a model of a robot, learning to program basic moves and turns for the robot, and then solving a real-world problem with the robot; specifically, PTs constructed a model of a vehicle base, programmed the base/car to move in a straight line and make turns, and then they problem-solved how to park the car autonomously. Preservice teachers worked in dyads or groups of three and the activity was scaffolded with a worksheet that guided PTs to learn how to code, from simple to more complex programming steps.
Quantitative data collection methods included:
Qualitative data included:
Data analysis occurred after final grades for the PTs were submitted. All questionnaires were analysed with SPSS 27. Normality tests were conducted at the 95% confidence interval for n =36 and were normal. Problem-solving skills were measured by summing five items (5, 6, 8, 9, and 10) from the STEM questionnaire. Then Cronbach’s alpha was calculated to show the degree of internal consistency for the items. The Cronbach’s alpha obtained for the summed scores of five items was pre = .790, post = .816, indicating acceptable values for reliability (George & Mallery, 2003). The self-efficacy measure consisted of four items that rated confidence on a scale from 0 to 100 (from not confident to completely confident). Items were (A) I feel confident that I have the skills necessary to use robotics for classroom instruction; (B) I feel confident that I can engage my students to participate in robotics-based projects; (C) I feel confident that I can help students when they have difficulty with robotics; and (D) I feel confident about teaching students science using LEGO® robotics. Cronbach’s alpha values obtained for the four items were pre = .927 and post = .938, indicating that the instrument reliability was good. Paired samples t-tests were conducted and effect sizes calculated using Cohen’s d where d = 0.2 (small effect), d = 0.5 (medium effect), and d = 0.8 (large effect) as suggested by Cohen (1988).
Qualitative analysis involved using the problem-solving framework to code lines (Table 1). A preliminary reading of the group transcripts reflected similar processes within group interactions. Two groups were selected based on audibility and succinctness of the transcripts to showcase the similarities and differences in PT problem-solving processes.
A paired samples t-test for problem-solving skills showed that there was a significant difference in problem-solving skills between pre- and post-test, M = .64; SD = 1.93; t(35) = 2.085; p = .044 at the 95% confidence level with a small effect size, Cohen’s d = 0.348. These findings suggest that PT participation in the problem-solving ER activities resulted in small changes to problem-solving competencies such as using a step-by-step process to solve problems.
Results indicated that participation in the ER problem-solving activity increased PTs’ self-efficacy, M =11; SD = 8.59; t(36) = 7.693; p < .001 with a large effect size, Cohen’s d = 1.28. These results suggest that the ER intervention did result in large practical gains in self-efficacy among this group.
Two cases of selected group interaction excerpts are presented in Table 2 and Table 3, respectively, to illustrate a sample of the decisions that PTs made during the problem-solving task of creating a program to parallel park a vehicle autonomously. A comparison of the two group interactions in terms of the problem-solving categories and decisions revealed some common decisions (Table 1). Both groups framed the problem in a similar way (Table 2, L 1-2; Table 3, L 1-2) by relating or situating the problem in a real-life parking situation and reflecting on prior, everyday experiences of parallel parking. Both groups collaborated with their peers to come up with a plan and solution; however, the steps involved in planning the process for solving and interpreting of information and choosing solutions were sequenced differently by the two groups. For example, Group 1 began by testing their initial solution through tinkering through trial and error (Table 2, L 6), whereas Group 2 proposed the initial plan by decomposing the problem into smaller steps and identified important criteria such as the mathematical parameters of the problem (Table 3, L 4-6) before testing. Both groups did conduct testing and troubleshooting through trial and error (Table 2, L6; Table 3, L40) but the number of iterations varied in the groups, resulting in different insights gained. Group 2 did multiple tests and retests (Table 3, L 46-49) and realised that it would be necessary to tell their students to mark where they were starting the parking to be able to repeat the movement as coded (L 50). Both groups reflected on how well the solution worked (Table 2, L 65-68; Table 3, L 41-46) and communicated their solutions (Table 2, L 69-70; Table 3, L 51-52) through visual code on a computer and demonstration of parking.
Table 2
Selected Excerpts Illustrating Problem-Solving Decisions of Group 1: Speaker 1 (female) and Speaker 2 (male)
| Line | Speaker | Preservice teacher’s group interactions | Problem-solving decisions |
| L1 | Speaker 2 | Yes. Okay. So realistically, when you reverse park in real life, it’s like a 45 degree kind of... | Relating to a real-life situation |
| L2 | Speaker 1 | Yeah, I always go like... yeah. | Reflecting on prior everyday experience |
| L3 | Speaker 2 | So I feel like if we maybe start, try with 45 degrees. So we can do move... right 45 degrees. Does that make sense? | Proposing a tentative solution to try out Seeking consensus |
| L4 | Speaker 1 | I feel that’s going to turn it. | |
| L5 | Speaker 2 | I know. I don’t know, I have no idea. | |
| L6 | Speaker 2 | Okay. We’ve got to figure out which way it’s going to move. Let’s just make it move. [run program] That was close. | Tinkering through trial and error |
| L7 | Speaker 1 | Okay. No, then we need to [inaudible 00:02:28] straight in. | Reflecting on solution |
| L8 | Speaker 2 | Come up and then go back in? | |
| L9 | Speaker 1 | Yeah. | |
| L10 | Speaker 2 | Back into the spot. So we want to go like this, and then forward- | Decomposing the problem into smaller steps by reflecting on prior experience |
| L11 | Speaker 1 | Forward, and then back. | |
| L12 | Speaker 2 | And then straight back- | |
| L13 | Speaker 1 | Yeah. | |
| L14 | Speaker 2 | ... like a car. That’d be cool. Oh... So we have it rotating right and then we’re going to change this then. | |
| L15 | Speaker 1 | Backward. | |
| L16 | Speaker 2 | Yeah. And then we’re gonna add... | |
| L17 | Speaker 1 | Forward. And so now the... | |
| L18-L64 | Omitted | Trial and error | |
| L65 | Speaker 2 | That’s pretty good. That was sweet. I won’t lie. So it still went a bit much. 20? Where did you put it, because it was in a good spot? [test the new value] Right there? No. That was so good. I’m impressed. Right here? | Reflecting on how well the solution worked |
| L66 | Speaker 1 | Yeah. | |
| L67 | Speaker 2 | Oh my god- | |
| L68 | Speaker 1 | That was a perfect one. That was so good. | |
| L69 | 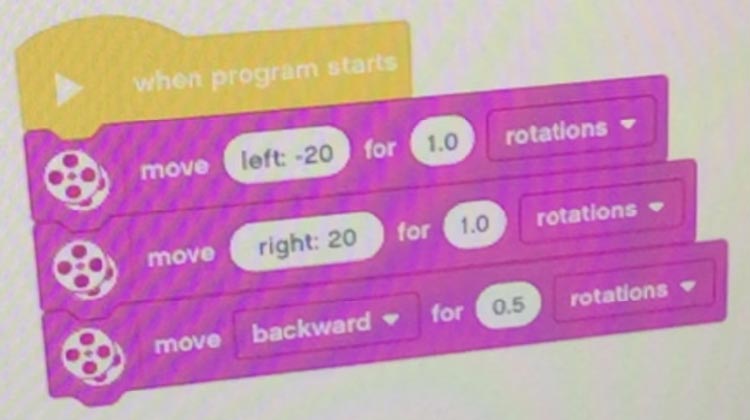 | Communicating results on the computer as a code | |
| L70 | https://youtube.com/shorts/CXkRD7c5NTY | Demonstrating the parallel parking |
Table 3
Selected Excerpts Illustrating Problem-Solving Decisions for Group 2: Three Male Speakers
| Line | Speaker | Group interactions | Problem-solving decisions |
| L1 | Speaker 2 | So are we going to pretend that this is like a road. Do you guys want to put like fake pylons or something. | Relating to a real-life situation |
| L2 | Speaker 1 | Just so we have a barrier for reference. When I think about parallel parking, you come up. .... | Reflecting on prior everyday experiences |
| L3 | Speaker 2 | Yeah. | |
| L4 | Speaker 1 | Maybe we’ll start back here. We’ll pull up past the spot and then we’ll back into it, okay? So first let’s find out how far forward we have to go. So, we know that if we move forward for one rotation it goes forward for 17.5 centimeters roughly | Decomposing the problem, identifying important criteria or features e.g., math to find solutions |
| L5 | Speaker 3 | Inches. | |
| L6 | Speaker 1 | Let’s do centimeters. So this looks like .... | |
| L7 | Speaker 2 | Wait, that doesn’t add up. | Reflecting on proposed solution and identifying problems with the math |
| L8 | Speaker 1 | What doesn’t add up? | |
| L9 | Speaker 2 | How would we get 84 centimeters with four and a half rotations? | |
| L10-39 omitted | |||
| L40 | Speaker 1 | Yeah, because instead of one rotation, let’s try 1.2. [test] | Testing by trial and error |
| L41 | Speaker 3 | There you go. | Reflecting on how well the solution worked |
| L42 | Speaker 1 | That’s pretty good. | |
| L43 | Speaker 2 | Yeah. | |
| L44 | Speaker 1 | I don’t know if we’re going to get any- | |
| L45 | Speaker 2 | More perfect. | |
| L46 | Speaker 1 | More perfect than that. Maybe let’s try back just a little bit further, 1.5. We’ll see if that makes any difference. | Reflecting on how well the solution worked Testing and retesting Collaboration and input from members |
| L47 | Speaker 2 | That’s perfect. | Testing and retesting Collaboration and input from members |
| L48 | Speaker 3 | I mean it kind of hit the curb a bit but so do I when I parallel park. | |
| L49 | Speaker 1 | I think that's perfect. I think that’s perfect, let’s do that one more time. [test program] Oh, that’s still wide. I think I started a little more in than the last time. We should have really marked this, somehow where we started. | Testing and retesting Collaboration and input from members Reflecting on how well the solution worked |
| L50 | Yeah, lesson learned. We’ll make sure to tell students that mark where you start on there. We have it down pat. It just depends on where you start. | Realising how to scaffold the activity for their own students | |
| L51 | 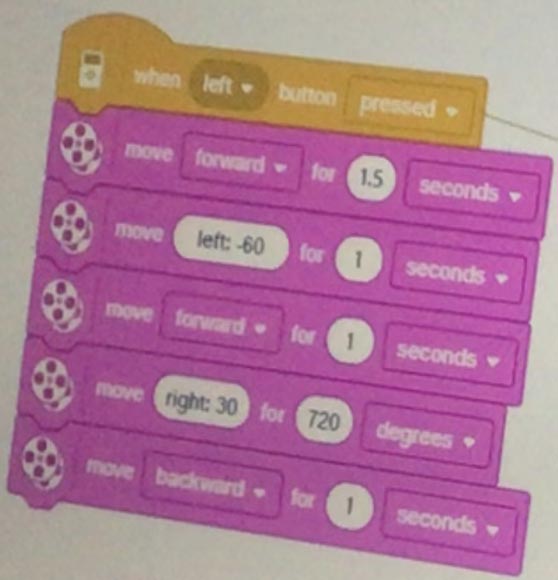 | Communicating results on the computer as a code | |
| L52 |  | Demonstrating the solution | |
This mixed methods study examined the effect of an ER intervention on PTs’ self-efficacy to teach with ER and on their STEM problem-solving skills. The study also provided insights into the decisions that PTs made as they used ER to problem-solve. The quantitative results showed that participation in this ER activity, scaffolded with a worksheet that incrementally introduced students to visual coding blocks from simple to more complex tasks, was effective (large effect size) at developing this group of PTs’ self-efficacy to teach with ER. Preservice teachers first created codes to make a driving base execute simple movements and turns and then solved more complex challenges — moving a distance in a straight line and then parallel parking. While a limitation of this study is that it is based on a short intervention, other studies have shown that scaffolded ER activities over a short period and structured modules do enhance PT confidence to integrate ER in teaching (Jaipal-Jamani & Angeli, 2017; Schina et al., 2021). In the current study, learning to teach with ER was scaffolded through instructor modeling scaffolding strategies (e.g., guiding the learning with a structured worksheet and providing hands-on experiences with ER). Such strategies have been shown to provide pedagogical insights to enhance teacher self-efficacy to teach (Tschannen-Moran & Hoy, 2007).
With respect to PT problem-solving competencies, the quantitative results were statistically significant with a small effect size, suggesting ER had a small practical impact. The latter result could be due to the short duration of the ER activities which were conducted over a 3-hour class session. For PTs in the current study, participation in more problem-solving ER activities over time may have resulted in a larger effect size for problem-solving skills. Interestingly, in another study that explored the effect of ER on problem-solving skills of middle school students, Zhang and Zhu (2022) reported that the effect of ER on problem-solving skills was smaller when compared to creativity skills and when compared to problem-solving among primary/junior students. These authors suggest that the smaller effect size for middle school students may be related to students having less exposure to hands-on experiences which are more common in the lower grades.
Nevertheless, the qualitative analysis of PT interactions during the problem-solving challenge of parallel parking yielded insightful results. The findings provide insights into the collaborative problem-solving processes as experienced by a group of junior/intermediate PTs in a particular Canadian context. The analysis showed that these PT groups followed the stages of problem-solving similar to those of STEM experts as proposed by Price et al. (2021). Preservice teachers began with framing the problem, engaged in planning, interpreted information and chose a solution, and reflected on and then communicated the results. However, unlike STEM experts, the decisions made at each problem-solving stage were limited to their personal and practical, everyday knowledge, with one group referencing STEM knowledge. Group 1 relied mainly on prior, everyday experiences of parallel parking to propose a plan and then learned how to decompose the problem into small steps after trial and error. Group 2 also used prior, everyday knowledge of parallel parking but drew on prior mathematics knowledge. They used mathematics criteria to decompose the problem during the planning phase and then tested the plan, followed by multiple tests and revisions. Multiple revisions by this group enabled them to gain pedagogical insights — their experiences as learners doing the activity made them realise that as teachers they needed to let students know to tape or mark the spot where the motion of the car began to be able to repeat the motion as coded. A comparison of the planning by the two groups suggests that everyday, practical knowledge and some STEM knowledge of novice problem-solvers (in this study mathematics knowledge) affected the sequencing and the types of problem-solving decisions made. Research by Tan et al. (2023) showed similar results with Grade 8 students, who also used practical knowledge to justify decisions more than they used disciplinary STEM concepts to explain decisions. The latter results suggest that to enhance novices’ use of STEM knowledge in the framing and planning stages of problem-solving so they can identify salient STEM criteria, novices should possess some pre-requisite knowledge of the problem context and STEM knowledge, such as mathematics skills and distance-speed relationships, before engaging in the ER activity. In the current study, the problem-solving context (driving) was familiar to the PTs and scaffolding for the mathematics knowledge was provided as hints on the worksheet. However, it was up to the PTs to read the worksheet and figure out other salient features—i.e., how speed affected distance—to the problem. With elementary school students, the teacher may need to provide more overt guidance such as a review of relevant STEM concepts pertinent to the problem or highlighting important features on the worksheet. Another finding of the current study is that peer interactions and feedback within the two groups promoted experimentation and reflection on problem solutions. Research shows that peer groups allow novice teachers like PTs to learn, experiment, and reflect on practice with feedback from their peers, which strengthens their ability to implement new pedagogies (Darling-Hammond & Baratz-Snowden, 2007). Another insight gained through analysis of the transcripts and observation of small group interactions during the study, was that the smaller groups, created to meet COVID-19 safety protocols, enabled all members to engage in the problem-solving process and minimised students in observer roles. The pedagogical issue of insufficient ER kits, which normally results in large group sizes, and the technical issues encountered when PTs downloaded software, can be addressed by using ER kits that offer free, online coding platforms with virtual ER simulations. Hence, a change recommended for the implementation of the ER activity post-COVID to continue to work in smaller groups (three or less) is for some PTs to work with physical ER kits (e.g., VEX robotics) while other groups learn coding with a simulated robot online. Examples of free or subscription based online, virtual, coding platforms are Virtual Robot Simulator and Imagine Robotify.
Limitations of the study include that findings cannot be generalised to all elementary PT populations due to the small sample and short duration of the intervention. However, some insights such as how to scaffold ER activities to support STEM problem-solving in groups may be applicable to similar teacher education contexts. The findings are also not applicable to secondary science PTs who have more STEM background knowledge and therefore may exhibit different decisions at the problem-solving stages. Another limitation of the study, similar to the Schina et al. (2021) study, is that PTs were not observed in the field to follow up on whether they implemented ER in classrooms. This was due to challenges encountered: PTs do their practice teaching in different elementary schools in year 2 of the program and they often do not teach science; many schools do not have ER kits so PTs may not be able to implement ER in schools; and it is challenging or a lengthy process to obtain ethics clearance to conduct research in schools. A suggestion for future research could therefore be to administer an online survey to PT participants at the end of the teacher education program to obtain data on their use of ER during the practicum. In this way, information on the frequency of ER use and for what purposes ER is used in schools can be obtained. Such information is useful to inform revisions to teacher education courses and promote collaborative professional learning programs with school boards to increase PT and teacher ER use for developing STEM knowledge and skills. It should be noted that the effect of gender and cultural differences was beyond the scope of the study.
Using a mixed methods, quasi-experimental design, this study implemented during the COVID-19 pandemic, explored the effect of an ER intervention activity on middle school PTs’ self-efficacy to teach with ER and develop STEM problem-solving skills. The findings suggest that participation in scaffolded ER activities, in small groups, is a promising strategy to improve middle school PTs’ self-confidence to teach with ER and develop their STEM problem-solving skills. A practical suggestion for implementing ER activities post-COVID, which is increasingly characterised by online and hybrid learning environments, is to use virtual ER simulations, which also addresses the issue of not having access to physical ER kits. Finally, this study makes a methodological contribution by illustrating how a STEM problem-solving framework can be used to analyse group discourse to identify the problem-solving decisions/processes made during an ER activity.
Altin, H., & Pedaste, M. (2013). Learning approaches to applying robotics in science education. Journal of Baltic Science Education, 12(3), 365-377. https://www.scientiasocialis.lt/jbse/files/pdf/vol12/365-377.Altin_JBSE_Vol.12.3.pdf
Anwar, S., Bascou, N. A., Menekse, M., & Kardgar, A. (2019). A systematic review of studies on educational robotics. Journal of Pre-College Engineering Education Research, 9(2), 1-24. https://doi.org/10.7771/2157-9288.1223
Aurini, J., McLevey, J., Stokes, A., & Gorbet, R. (2017). Classroom robotics and acquisition of 21st century competencies: An action research study of nine Ontario school boards. Ministry of Education and the Council of Directors of Education of Ontario.
Bandura, A. (1994). Self-efficacy. In V.S. Ramachandran (Ed.), Encyclopedia of human behavior (Vol. 4, pp. 71-81). Academic Press.
Benitti, F. B. V. (2012). Exploring the educational potential of robotics in schools: A systematic review. Computers & Education, 58(3), 978-988. https://doi.org/10.1016/j.compedu.2011.10.006
Bybee, R. W. (2013). The case for STEM education: Challenges and opportunities. National Science Teachers Association.
Ching, Y. H., Yang, D., Wang, S., Baek, Y., Swanson, S., & Chittoori, B. (2019). Elementary school student development of STEM attitudes and perceived learning in a STEM integrated robotics curriculum. TechTrends, 63, 590-601. https://doi.org/10.1007/s11528-019-00388-0
Chung, C. C., Cartwright, C., & Cole, M. (2014). Assessing the impact of an autonomous robotics competition for STEM education. Journal of STEM Education: Innovations and Research, 15(2), 24-34. https://www.jstem.org/jstem/index.php/JSTEM/article/view/1704/1606
Cohen, J. (1988). Statistical power analysis for the behavioral sciences (2nd ed.). Lawrence Erlbaum Associates.
Creswell, J. W., & Plano Clark, V. L. (2017). Designing and conducting mixed methods research. Sage.
Darling-Hammond, L., & Baratz-Snowden, J. (2007). A good teacher in every classroom: Preparing the highly qualified teachers our children deserve. Educational Horizons, 85(2), 111-132. http://www.jstor.org/stable/42926597
Darmawansah, D., Hwang, G. J., Chen, M. R. A., & Liang, J. C. (2023). Trends and research foci of robotics-based STEM education: A systematic review from diverse angles based on the technology-based learning model. International Journal of STEM Education, 10, Article 12. https://doi.org/10.1186/s40594-023-00400-3
Eguchi, A. (2021). Theories and practices behind educational robotics for all. In. S. Papadakis & M. Kalogiannakis (Eds.), Handbook of research on using educational robotics to facilitate student learning (pp. 68-106). IGI Global. https://doi.org/10.4018/978-1-7998-6717-3.ch003
Fegely, A., & Tang, H. (2022). Learning programming through robots: The effects of educational robotics on pre-service teachers’ programming comprehension and motivation. Educational Technology Research and Development, 70(6), 2211-2234. https://doi.org/10.1007/s11423-022-10174-0
George, D., & Mallery, P. (2003). SPSS for Windows step by step: A simple guide and reference (11.0 Update, 4th ed.). Allyn & Bacon.
Glezou, K. V. (2021). Robotics as a powerful vehicle toward learning and computational thinking in secondary education of 21st century. In S. Papadakis & M. Kalogiannakis (Eds.), Handbook of research on using educational robotics to facilitate student learning (pp. 1-40). IGI Global. https://doi.org/10.4018/978-1-7998-6717-3.ch001
Hudson, M. A., Baek, Y., Ching, Y. H., & Rice, K. (2020). Using a multifaceted robotics-based intervention to increase student interest in STEM subjects and careers. Journal for STEM Education Research, 3, 295-316. https://doi.org/10.1007/s41979-020-00032-0
Jaipal-Jamani, K., & Angeli, C. (2017). Effect of robotics on elementary preservice teachers’ self-efficacy, science learning, and computational thinking. Journal of Science Education and Technology, 26(2), 175-192. https://doi.org/10.1007/s10956-016-9663-z
Karp, T., & Maloney, P. (2013). Exciting young students in grades K-8 about STEM through an afterschool robotics challenge. American Journal of Engineering Education, 4(1), 39-54. https://eric.ed.gov/?id=EJ1057112
Kaya, E., Newley, A., Deniz, H., Yesilyurt, E., & Newley, P. (2017). Introducing engineering design to a science teaching methods course through educational robotics and exploring changes in views of preservice elementary teachers. Journal of College Science Teaching, 47(2), 66-75. http://dx.doi.org/10.2505/4/jcst17_047_02_66
Kopcha, T. J., McGregor, J., Shin, S., Qian, Y., Choi, J., Mativo, J. M., & Choi, I. (2017). Developing an integrative STEM curriculum for robotics education through educational design research. Journal of Formative Design in Learning, 1(2), 31-44. http://dx.doi.org/10.1007/s41686-017-0005-1
Kucuk, S., & Sisman, B. (2018). Pre-service teachers’ experiences in learning robotics design and programming. Informatics in Education, 17(2), 301-320. https://doi.org/10.15388/infedu.2018.16
Lemon, N., & Garvis, S. (2016). Pre-service teacher self-efficacy in digital technology. Teachers and Teaching, 22(3), 387-408. https://doi.org/10.1080/13540602.2015.1058594
Miller, K., Sonnert, G., & Sadler, P. (2018). The influence of students’ participation in STEM competitions on their interest in STEM careers. International Journal of Science Education, Part B, 8(2), 95-114. https://doi.org/10.1080/21548455.2017.1397298
National Research Council (2012). A framework for K-12 science education: Practices, crosscutting concepts, and core ideas. The National Academies Press.
National Research Council (2014). STEM integration in K-12 education: Status, prospects, and an agenda for research. The National Academies Press.
Nemiro, J. E. (2021). Building collaboration skills in 4th-to 6th-grade students through robotics. Journal of Research in Childhood Education, 35(3), 351-372. https://doi.org/10.1080/02568543.2020.1721621
Nolan, A., & Molla, T. (2017). Teacher confidence and professional capital. Teaching and Teacher Education, 62, 10-18. https://doi.org/10.1016/j.tate.2016.11.004
Nugent, G., Barker, B. S., & Grandgenett, N. (2012). The impact of educational robotics on student stem learning, attitudes, and workplace skills. In B. Barker, G. Nugent, N. Grandgenett, & V. Adamchuk (Eds.), Robots in K-12 education: A new technology for learning (pp. 186-203). IGI Global. https://doi-org.proxy.library.brocku.ca/10.4018/978-1-4666-0182-6.ch009
OECD (2015). PISA 2015 collaborative problem-solving. https://www.oecd.org/pisa/innovation/collaborative-problem-solving/
OECD (2023). OECD Future of Education and Skills 2030: OECD Learning Compass 2030: A series of concept notes. https://www.oecd.org/education/2030-project/contact/
Ontario Curriculum and Resources. (2009). The Ontario Curriculum, Grades 9 and 10 (revised 2009). https://www.dcp.edu.gov.on.ca/en/curriculum/technological-education
Ontario Curriculum and Resources. (2022). Grades 1–8: Science and Technology. https://www.dcp.edu.gov.on.ca/en/curriculum/science-technology
Palmer, D. (2011). Sources of efficacy information in an inservice program for elementary teachers. Science Education, 95(4), 577-600. https://doi.org/10.1002/sce.20434
Park, J. (2015). Effect of robotics-enhanced inquiry-based learning in elementary science education. Journal of Computers in Mathematics and Science Teaching, 34(1), 71-95 https://www.learntechlib.org/primary/p/130555/
Piedade, J., Dorotea, N., Pedro, A., & Matos, J. F. (2020). On teaching programming fundamentals and computational thinking with educational robotics: A didactic experience with pre-service teachers. Education Sciences, 10(9), 214. https://doi.org/10.3390/educsci10090214
Price, A. M., Kim, C. J., Burkholder, E. W., Fritz, A. V., & Wieman, C. E. (2021). A detailed characterization of the expert problem-solving process in science and engineering: Guidance for teaching and assessment. CBE–Life Sciences Education, 20(3), 1-15. https://doi.org/10.1187/cbe.20-12-0276
Priemer, B., Eilerts, K., Filler, A., Pinkwart, N., Rösken-Winter, B., Tiemann, R., & Zu Belzen, A. U. (2020). A framework to foster problem-solving in STEM and computing education. Research in Science & Technological Education, 38(1), 105-130. https://doi.org/10.1080/02635143.2019.1600490
Privitera, G. J., & Ahlgrim-Delzell, L. (2018). Research methods for education. Sage.
Rohaan, E. J., Taconis, R., & Jochems, W. M. (2012). Analysing teacher knowledge for technology education in primary schools. International Journal of Technology and Design Education, 22(3), 271-280. https://doi.org/10.1007/s10798-010-9147-z
Sáez-López, J. M., Sevillano-García, M. L., & Vazquez-Cano, E. (2019). The effect of programming on primary school students’ mathematical and scientific understanding: Educational use of mBot. Educational Technology Research and Development, 67, 1405-1425. https://doi.org/10.1007/s11423-019-09648-5
Schina, D., Esteve-González, V., & Usart, M. (2021). An overview of teacher training programs in educational robotics: Characteristics, best practices and recommendations. Education and Information Technologies, 26(3), 2831-2852. https://doi.org/10.1007/s10639-020-10377-z
Siverling, E. A., Suazo-Flores, E., & Moore, T. J. (2018, June). STEM content in elementary school students’ evidence-based reasoning discussions (fundamental) [Paper presentation]. ASEE Annual Conference & Exposition, Salt Lake City, Utah. https://doi.org/10.18260/1-2--30986
Tan, A. L., Ong, Y. S., Ng, Y. S., & Tan, J. H. J. (2023). STEM problem-solving: Inquiry, concepts, and reasoning. Science & Education, 32(2), 381-397. https://doi.org/10.1007/s11191-021-00310-2
Taylor, K., & Baek, Y. (2018). Collaborative robotics, more than just working in groups. Journal of Educational Computing Research, 56(7), 979-1004. https://doi.org/10.1177/0735633117731382
Tschannen-Moran, M., & Hoy, A. W. (2007). The differential antecedents of self-efficacy beliefs of novice and experienced teachers. Teaching and Teacher Education, 23(6), 944-956. https://doi.org/10.1016/j.tate.2006.05.003
Velthuis, C., Fisser, P., & Pieters, J. (2014). Teacher training and pre-service primary teachers’ self-efficacy for science teaching. Journal of Science Teacher Education, 25(4), 445-464. https://doi.org/10.1007/s10972-013-9363-y
Williams, D. C., Ma, Y., Prejean, L., Ford, M. J., & Lai, G. (2008). Acquisition of physics content knowledge and scientific inquiry skills in a robotics summer camp. Journal of Research on Technology in Education, 40(2), 201-216. https://doi.org/10.1080/15391523.2007.10782505
Zhang, Y., Luo, R., Zhu, Y., & Yin, Y. (2021). Educational robots improve K-12 students’ computational thinking and STEM attitudes: Systematic review. Journal of Educational Computing Research, 59(7), 1450-1481. https://doi.org/10.1177/0735633121994070
Zhang, Y., & Zhu, Y. (2022). Effects of educational robotics on the creativity and problem-solving skills of K-12 students: A meta-analysis. Educational Studies, 1-19. https://doi.org/10.1080/03055698.2022.2107873
Ziaeefard, S., Miller, M. H., Rastgaar, M., & Mahmoudian, N. (2017). Co-robotics hands-on activities: A gateway to engineering design and STEM learning. Robotics and Autonomous Systems, 97, 40-50. https://doi.org/10.1016/j.robot.2017.07.013
Kamini Jaipal-Jamani is a full Professor in Science Education and Teacher Education and Chair, Department of Educational Studies at Brock University in Canada. Previously, she was the director of the Teacher Education program from 2018–2021. Her current research focuses on preservice teachers using educational robotics to teach STEM. Email: kjaipal@brocku.ca ORCID: https://orcid.org/0000-0002-6750-9982