
Marc Basque, Université de Moncton, Canada
Xavier Robichaud, Université de Moncton, Canada
Robert Levesque, Université de Moncton, Canada
Lyne Chantal Boudreau, Université de Moncton, Canada
Mathieu Lang, Université de Moncton, Canada
Viktor Freima, Université de Moncton, Canada
Lors de la formation initiale en enseignement, il arrive fréquemment que des classes universitaires se déplacent en milieu scolaire afin de créer des liens entre les apprentissages théoriques (effectués dans le cadre des cours universitaires) et la pratique. Cependant, dans le contexte de la pandémie de COVID-19 et des diverses mesures sanitaires de la santé publique, la formation pratique des étudiantes et des étudiants en éducation dans les établissements scolaires n’a pu avoir lieu. C’est dans cette perspective qu’un projet de recherche a été réalisé pour étudier l’enseignement à distance par le biais d’un robot de téléprésence. À partir de leur campus respectif, 17 étudiantes et étudiants ont enseigné des concepts à des élèves des écoles environnantes, et ce, en contrôlant un robot. Les résultats de l’analyse thématique montrent qu’il a été possible d’interagir avec les élèves lors de l’enseignement et que les étudiantes et les étudiants en formation ont acquis des connaissances pédagogiques liées à l’enseignement au cours de cette expérience pratique. Cette étude démontre que cette expérience novatrice a permis de parachever les apprentissages théoriques du cours universitaire.
Mots-clés : enseignement à distance, expériences pratiques en milieu universitaire, formation initiale en enseignement, robot de téléprésence
In preservice teacher education, university courses often venture into the classroom to connect theory with practice. However, during the COVID-19 pandemic and the related public health measures, teacher training experiences in the field were discontinued. This research project was conducted to study distance teaching with the help of a telepresence robot. From their respective campuses, 17 preservice teachers were able to practice teaching in local schools using this mobile tool. Results of a thematic analysis reveal that it was possible for the preservice teachers to interact with the students during their teaching and that the preservice teachers acquired pedagogical knowledge related to teaching during this practical experience. The study also shows that this innovative practice complemented the theoretical learning activities of the preservice course.
Keywords: distance teaching, preservice teacher training, practical experiences in a university environment, telepresence robot
En formation initiale en enseignement, dans les diverses universités au Canada, les étudiantes et les étudiants suivent des cours théoriques portant sur des domaines de formation générale et d’autres reliés spécifiquement à la profession enseignante (Lepage et al., 2015). De plus, divers stages pratiques en milieu scolaire (stage professionnel) ont lieu en cours de formation (Pelletier, 2020). Les stages en enseignement ont pour but de mettre en pratique les acquis théoriques universitaires (Desbiens et al., 2019; Patroucheva, 2014). Plusieurs recherches (Desbiens et al., 2009; Gervais & Desrosiers, 2005; Malo, 2011; Tardif et al., 2021) soulignent que ces stages sont considérés comme l’expérience la plus pertinente du programme de formation.
Malgré ces stages de formation, les étudiantes et les étudiants font souvent état du manque de liens entre les apprentissages théoriques en cours et les apprentissages pratiques qui ont lieu dans le milieu scolaire (Desbiens et al., 2019; Freiman et al., 2023; Horn & Campbell, 2015; Lepage et al., 2015). Il semble exister un décalage entre le contenu de la formation universitaire et la réalité dans les écoles (Gravett & Ramsaroop, 2017). Les étudiantes et les étudiants soulignent qu’ils ne sont pas bien préparés pour gérer la complexité du travail qu’ils ont à réaliser au quotidien dans leur classe et dans leur école (Gravett & Ramsaroop, 2017; Tardif et al., 2021).
Ce manque de liens entre la théorie et la pratique (Hobson, 2003) peut engendrer des problèmes sur le plan de l’insertion professionnelle où l’on remarque un « taux d’abandon de la profession enseignante particulièrement élevé dans les cinq premières années d’exercice » (Pelletier, 2020, p. 397). Ceci pourrait être expliqué en partie par le fait qu’il n’y a pas suffisamment de liens entre les travaux demandés dans les cours universitaires et ceux exigés dans les écoles (Gravett & Ramsaroop, 2017).
C’est dans cette perspective que de plus en plus d’expériences pratiques ont lieu dans le milieu scolaire. Cette formation en milieu de pratique s’ajoute aux divers stages effectués en cours de formation, et ce, dans le but d’offrir le plus de temps possible en salle de classe pour avoir la chance d’observer, expérimenter et ainsi bonifier les connaissances, les compétences et les attitudes envers la profession (McLoughlin & Maslak, 2003; Selen Kula & Demirci Güler, 2021). Plusieurs recherches (Cirillo et al., 2020; Cooper & Nesmith, 2013; Selen Kula & Demirci Güler, 2021) ont d’ailleurs montré que les expériences pratiques représentent des occasions importantes concernant le développement et l’apprentissage des futures enseignantes et des futurs enseignants.
Les expériences pratiques sur le terrain dans le cadre d’un cours de formation initiale en enseignement ne sont toutefois pas toujours possibles. Dans notre cas, le contexte de la pandémie de COVID-19 de 2020-2022 nous a obligés d’annuler les expériences pratiques faisant partie des cours universitaires en raison des mesures sanitaires mises en place dans le système scolaire. Il ne fut donc pas possible pour les étudiantes et les étudiants de se présenter dans les écoles pour expérimenter des scénarios pédagogiques auprès des élèves du système scolaire.
Ce problème nous amena à réfléchir sur la possibilité d’utiliser des technologies numériques pour offrir des expériences authentiques avec des élèves tout en étant à distance. C’est dans cette perspective que cette recherche fût menée afin d’étudier l’enseignement à distance par un robot de téléprésence mobile. Il s’agissait d’analyser la perception que les étudiantes et étudiants avaient de leur expérience d’enseignement avec un robot, de vérifier s’il serait possible d’interagir avec les élèves lors de celle-ci et de déterminer les avantages et les défis de cette méthode d’enseignement. Sur le plan pratique, cette expérimentation avait pour but de permettre aux étudiantes et aux étudiants de mettre en pratique les apprentissages effectués dans leurs cours théoriques, malgré les restrictions sanitaires qui interdisaient leur présence dans les écoles.
Les expériences pratiques représentent des situations pour lesquelles les étudiantes et les étudiants en éducation vont dans les écoles et mettent en pratique les théories et les notions apprises dans leurs cours universitaires (Cooper & Nesmith, 2013). Selon ces auteurs, les expériences pratiques, lorsqu’elles sont effectuées tôt dans le programme de formation, amènent de nombreux bénéfices, tels que « mettre en pratique les connaissances apprises dans les cours universitaires, d’en apprendre davantage sur le fonctionnement de la salle de classe et sur les différences des élèves et de collaborer et d’apprendre d’enseignantes ou d’enseignants expérimentés » (p. 167, traduction libre).
Les robots de téléprésence sont constitués d’un écran (tablette informatique) et de caméras positionnées sur un socle motorisé ayant des roues sous la partie inférieure qui lui permettent de se déplacer, et il est possible de les commander à distance à partir d’un ordinateur, d’une tablette personnelle ou d’un téléphone portable (Batmaz et al., 2020; Dussarps et al., 2020; Lehmans et al., 2020). Plus précisément, le robot de téléprésence « dispose de deux caméras, une en hauteur permettant de voir ce qui se trouve devant lui “à hauteur d’homme”, et une caméra au niveau du sol pour faciliter les déplacements et éviter les obstacles » (Dussarps et al., 2020, p. 124). La différence majeure entre les robots de téléprésence et les écrans conventionnels réside dans le fait qu’ils peuvent tourner à 360 degrés ainsi que se déplacer dans l’environnement ce qui permet plus d’interactions (Jakonen & Jauni, 2021; Khadri, 2021; Lei, 2021).
Le terme « téléprésence » est utilisé pour décrire les technologies qui permettent de se sentir socialement présent lorsque des utilisateurs communiquent ou interagissent avec des personnes à distance (Batmaz et al., 2020; Khadri, 2021; Liao et al., 2022; Petit et al., 2020). On décrit même ce phénomène comme une immersion dans laquelle l’utilisateur a la sensation d’être plongé dans le milieu, donc de se sentir présent (Dussarps et al., 2020).
Les robots de téléprésence sont souvent utilisés dans le milieu de l’éducation pour permettre à des élèves (malades, handicapés, accidentés) d’assister aux enseignements (Carmichael, 2023; Dussarps et al., 2020; Gallon & Abenia, 2018; Rinaudo, 2018). À cet effet, Dussarps et ses collaborateurs (2020) soulignent que beaucoup d’élèves n’auraient probablement pas persévéré à court terme dans leur scolarité, et ceci pourrait s’expliquer par le fait que les élèves gardent ainsi leur statut de pair dans la classe, malgré leur isolement.
L’utilisation des technologies et plus particulièrement des applications de vidéoconférence est de plus en plus populaire dans les milieux de l’éducation, et ce, même dans les établissements d’enseignement supérieur (Jakonen & Jauni, 2021). Il en est de même pour l’utilisation des robots de téléprésence « à cause du grand potentiel pour améliorer les expériences éducatives des utilisateurs à distance » (Khadri, 2021, p. 1, traduction libre).
Malgré cet engouement, les recherches sont rares concernant les effets de l’usage de robots de téléprésence et leur acceptation dans les milieux de l’éducation (Lehmans et al., 2020; Lei et al., 2021). Au niveau universitaire, quelques recherches ont été déployées. À partir d’expériences réelles d’usage des robots en contexte universitaire, Lehmans et ses collaborateurs (2020) ont proposé des pistes afin de sensibiliser et former les enseignantes et les enseignants aux différentes façons d’intégrer les robots de téléprésence, ce qui permet de s’assurer une meilleure inclusion des apprenantes et des apprenants. Les analyses de la recherche de Rinaudo (2018) ont montré que l’utilisation des robots de téléprésence amène un apport sur le plan pédagogique tout en étant vécue comme un processus de subjectivation. Dans leur étude, Jakonen et Jauni (2021) ont étudié comment les robots de téléprésence peuvent être utilisés afin de faciliter la participation des apprenantes et des apprenants dans l’enseignement des langues étrangères au niveau universitaire. Dans un contexte similaire, Liao et al. (2022) ont montré que les apprenantes et les apprenants ont vécu des expériences d’apprentissage positives même si les enseignantes et les enseignants étaient situés dans un autre pays. Quant à Lei et al. (2021), ils ont étudié la perception des universitaires envers l’utilité des robots de téléprésence, leur facilité d’utilisation ainsi que la norme subjective et les risques reliés à ceux-ci. Dans une autre étude, Khadri (2021) a montré le grand potentiel des robots de téléprésence et que ceux-ci ont un effet positif sur les activités éducatives, mais que de nombreux obstacles peuvent être rencontrés. Comme l’indique ce chercheur, d’autres recherches sont nécessaires en ce qui concerne « l’examen des perceptions des étudiantes et des étudiants concernant les apprentissages qui peuvent être réalisés via les robots de téléprésence afin de mieux comprendre le potentiel et les limites pédagogiques de ceux-ci » (p. 15, traduction libre).
Cette recherche de type exploratoire est de nature qualitative.
L’échantillon pour cette recherche fut composé de 17 étudiantes et étudiants en deuxième année du baccalauréat en éducation. Ils étaient inscrits au cours Apprentissage et enseignement et provenaient de deux campus de l’Université de Moncton (campus d’Edmundston et campus de Shippagan) situés au Nouveau-Brunswick (Canada).
Au départ, les étudiantes et les étudiants furent initiés au projet de recherche par leurs professeurs. Par la suite, ils ont effectué la planification de leur enseignement. Finalement, le jour de l’expérimentation, au lieu de se déplacer physiquement dans l’établissement scolaire, les étudiantes et les étudiants ont effectué de l’enseignement à distance avec le robot de téléprésence qui fut apporté préalablement dans les écoles.
Après la réalisation de cette expérimentation auprès des élèves du système scolaire, les étudiantes et les étudiants ont répondu à un questionnaire (que nous avons construit) portant sur différentes thématiques (leur appréciation de l’expérience, les apprentissages effectués, etc.).
Nous avons effectué une analyse thématique dans laquelle des thèmes ont été attribués en lien avec les réponses obtenues au questionnaire (Paillé & Mucchielli, 2021). L’objectif principal de l’analyse thématique fut « la transposition d’un corpus donné en un certain nombre de thèmes représentatifs du contenu analysé, et ce, en rapport avec l’orientation de recherche » (Paillé & Mucchielli, 2021, p. 270). Cette transposition permet « de repérer, de classer, d’ordonner l’information » (Van der Maren, 2014, p. 205).
À la suite de l’analyse thématique, les résultats des analyses furent premièrement examinés pour une validation dans le temps (fiabilité intra-codeur). À l’étape suivante, les résultats furent traités par un examinateur externe (fiabilité inter-codeur). La fiabilité inter-codeur fut de 93,6 %, tandis que la fiabilité intra-codeur fut de 100 %. Ces résultats correspondent aux exigences de la fiabilité établies par Miles et Huberman (2003, 2014).
Figure 1
Perception des étudiantes et des étudiants
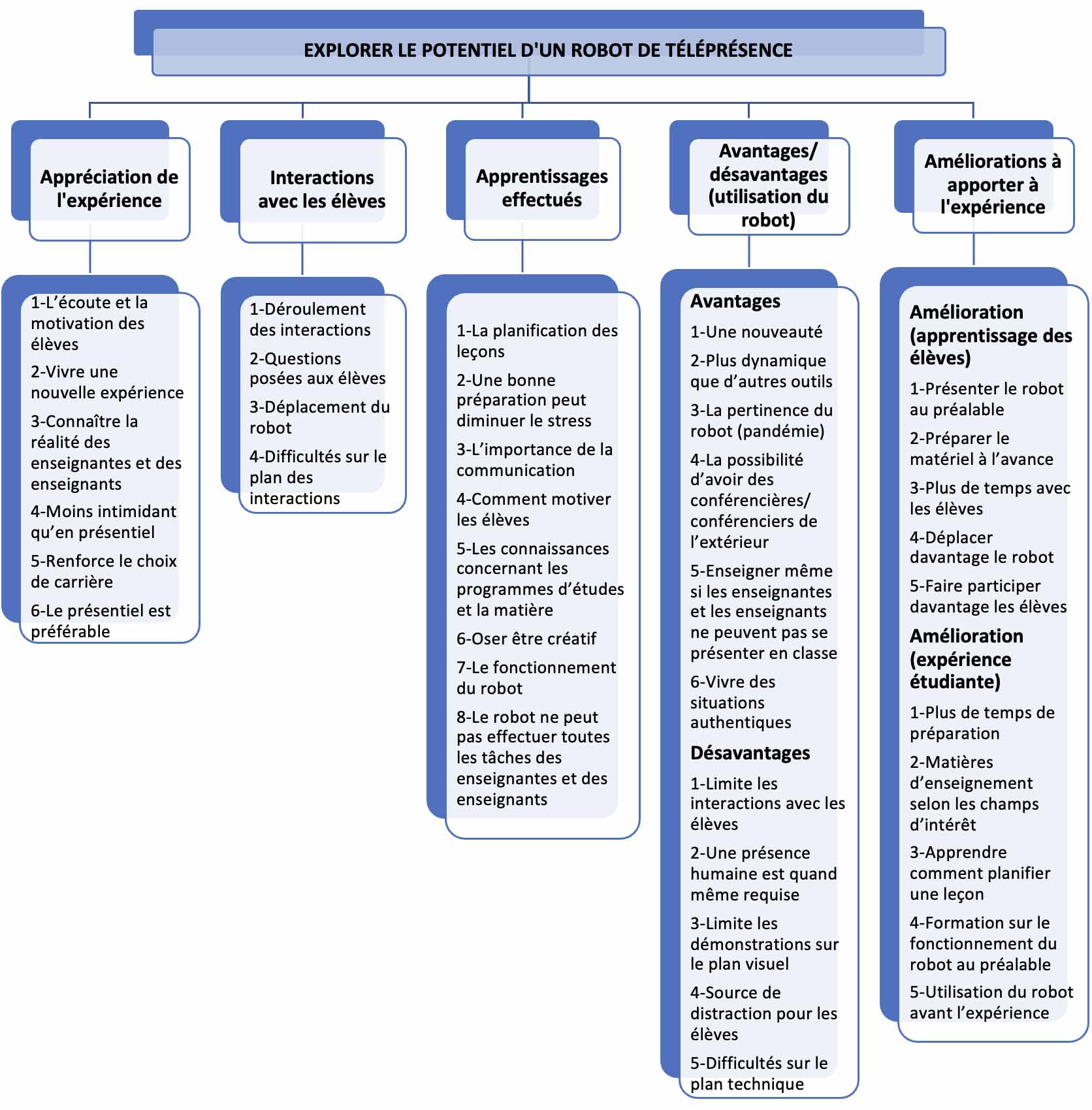
Les étudiantes et les étudiants ont perçu positivement l’expérimentation auprès des élèves par l’entremise du robot de téléprésence mobile.
En somme, j’ai adoré enseigner à des élèves de 6e année à partir d’un robot de téléprésence. Notre présentation s’est très bien déroulée et j’ai beaucoup appris de cette expérience. Si l’occasion se représente, c’est certain que je veux enseigner de nouveau à partir d’un robot de téléprésence [étudiant(e) 9].
Cette appréciation de la part des étudiantes et des étudiants concerne plusieurs aspects de la relation enseignement-apprentissage. Tout d’abord, ils ont aimé que les élèves soient à l’écoute et étaient motivés par la leçon.
J’ai trouvé que les élèves étaient plus motivés à nous écouter, car ils étaient intrigués par le robot donc leur attention était directement sur nous. Si nous avions fait la même expérience, mais en présentiel dans leur classe, je suis certaine que plusieurs n’auraient pas été à l’écoute [étudiant(e) 6].
Cette nouvelle forme d’enseignement a permis aux étudiantes et aux étudiants de vivre une nouvelle expérience enrichissante. « J’ai aimé enseigner à partir d’un robot de téléprésence, car ce fut une nouvelle expérience et ça m’a permis de découvrir ce qu’est l’enseignement à distance à travers un robot » [étudiant(e) 1].
Cette expérimentation avec le robot a également permis aux étudiantes et aux étudiants de mieux connaître la réalité des enseignantes et des enseignants dans un contexte d’enseignement à distance :
Enseigner avec l’aide du robot m’a permis de voir la réalité des enseignants lorsqu’ils enseignent à distance. Bref, l’expérimentation m’a donné la chance, en tant que future enseignante, de voir à quoi peut ressembler l’enseignement à distance [étudiant(e) 8].
Étant donné que les étudiantes et les étudiants sont en début de formation, plusieurs n’ont pas encore eu la chance d’enseigner à des élèves. Pour certains, c’était la première expérience en enseignement auprès des élèves. Le fait d’enseigner à partir d’un robot à distance a probablement été moins intimidant qu’être en présentiel auprès des élèves. « Parce que c’est moins intimidant que d’aller directement en classe pour la première fois » [étudiant(e) 15].
Le questionnement concernant leur choix de carrière est toujours présent pour plusieurs étudiantes et étudiants. Les expériences en enseignement auprès des élèves dans les écoles peuvent renforcer leur position à cet effet : « Ça nous a permis de nous souvenir pourquoi on veut réussir et devenir des enseignants » [étudiant(e) 13].
Malgré le fait que tous les étudiantes et les étudiants ont apprécié leur expérience et les interactions avec les élèves, il demeure que certains auraient préféré enseigner en présentiel. « Ce ne serait certainement pas ma méthode préférée. J’aime mieux interagir face à face avec les jeunes » [étudiant(e) 12].
Lorsque l’on enseigne à distance, les interactions entre l’enseignante ou l’enseignant et les élèves demeurent une préoccupation constante pour celui ou celle qui enseigne. Avec l’enseignement à partir d’un robot de téléprésence, il y a lieu de vérifier si ces interactions seront présentes. À cet effet, des étudiantes et des étudiants nous ont indiqué qu’ils ont eu la chance d’interagir avec les élèves. « Lors de la leçon nous avons interagi avec les élèves à quelques occasions. Les interactions se sont bien déroulées » [étudiant(e) 9].
Une autre personne étudiante ajoute : « J’ai aimé que les élèves aient interagi avec nous et qu’ils n’ont pas eu peur de répondre à nos questions. Ils ont été très interactifs donc ceci a mis notre présentation plus agréable et intéressante » [étudiant(e) 17].
Pour susciter des interactions avec leurs élèves, les enseignantes et les enseignants vont souvent utiliser le questionnement. C’est dans cette perspective que les étudiantes et les étudiants ont posé de nombreuses questions aux élèves lors de leur enseignement :
Tout au long de notre présentation, nous posions des questions aux élèves sur la matière que nous enseignions. Par la suite, ceux-ci nous répondaient et nous leur donnions les bonnes réponses. Puis, à la fin, nous avons eu une période de questions où nous avons pu discuter avec eux [étudiant(e) 9].
Le fait que le robot pouvait se déplacer dans la classe a facilité les interactions avec les élèves. « Nous pouvions aussi faire bouger le robot (se déplacer pour aller voir les élèves à leur pupitre) » [étudiant(e) 2].
C’était facile de se déplacer avec le robot pour aller voir les élèves qui avaient des questions ou qui voulaient donner une réponse. De cette façon, j’ai senti que les élèves se sentaient écoutés et savaient quand on s’adressait à l’un d’eux spécifiquement [étudiant(e) 4].
Malheureusement, des difficultés sur le plan technique peuvent à l’occasion diminuer les interactions avec les élèves : « Les interactions se sont faites avec un peu de difficulté, car le micro du robot n’était pas assez puissant pour capter les voix des élèves. L’enseignante a dû à certains moments répéter l’information pour aider à la compréhension » [étudiant(e) 7].
Malgré le fait que les étudiantes et les étudiants ont beaucoup aimé l’expérience en enseignement avec le robot de téléprésence, il y a lieu de se questionner concernant les apprentissages réalisés par ceux-ci. C’est principalement à partir de cette constatation qu’il sera possible de justifier l’utilisation du robot de téléprésence dans le cadre de la formation universitaire des étudiantes et des étudiants en éducation.
Tout d’abord, les étudiantes et les étudiants ont effectué des apprentissages sur la planification de leçons. « Mon apprentissage sur comment bâtir une mini-leçon » [étudiant(e) 7].
Cette préparation de leçons peut même devenir très importante afin de diminuer leur stress lors de l’enseignement. « J’ai appris que c’est très important d’être bien préparé avant d’enseigner parce qu’une bonne préparation peut aider à réduire le stress » [étudiant(e) 8]. Ils ont également réalisé l’importance qui doit être accordée à la communication pour la réussite de leur enseignement :
Cette expérience m’a fait réaliser que la communication est essentielle dans toute situation, mais particulièrement lorsque nous enseignons et que nous sommes à distance. En effet, c’est très important de bien communiquer afin d’éviter toute source de confusion et d’ambiguïté [étudiant(e) 8].
En plus des apprentissages réalisés en planification et en communication, ils ont réussi à mettre au point des manières de procéder afin de motiver les élèves dans leur apprentissage : « Oui, j’ai fait des apprentissages pendant la préparation de l’expérience et de l’enseignement. En autres, j’ai appris à trouver des façons pour stimuler les élèves à travers un robot et de garder leur attention » [étudiant(e) 1].
Durant la préparation de leur leçon, les étudiantes et les étudiants ont appris l’importance de consulter les programmes d’études. Cela leur a permis d’en connaître davantage concernant les résultats d’apprentissage qui doivent être enseignés aux élèves : « Toucher et voir un programme d’études réel fut très profitable pour nous, puisqu’avec l’aide d’une enseignante, nous avons compris un peu le fonctionnement des RAS et les démarches à prendre » [étudiant(e) 10].
L’expérimentation a permis de faire prendre conscience aux étudiantes et aux étudiants que la créativité pouvait permettre de surmonter des défis. « J’ai aussi appris qu’il faut oser sortir des sentiers battus et être créatif lorsque nous sommes confrontés à un défi ou à une situation particulière » [étudiant(e) 8].
Les étudiantes et les étudiants ont également appris à faire fonctionner le robot et ont pris conscience que celui-ci ne peut pas réaliser toutes les tâches d’un enseignant.
En autres, j’ai appris à me servir du robot [étudiant(e) 1].
Le robot comporte plusieurs avantages, mais il ne peut pas faire tout le travail d’un enseignant. Par exemple, il aurait été difficile de faire de la discipline dans la classe, puisque nous n’étions pas physiquement présents [étudiant(e) 9].
Les étudiantes et les étudiants ont repéré plusieurs avantages relatifs à l’utilisation d’un robot de téléprésence mobile comme outil technologique pour l’enseignement. Ils ont indiqué que l’effet nouveauté pourrait être une source de motivation pour les élèves : « En enseignant avec le robot, les élèves voient quelque chose de nouveau et sont portés à vouloir écouter, car c’est différent des méthodes d’apprentissage déjà présentes. Ils n’ont pas la chance d’en avoir un dans leur classe chaque jour » [étudiant(e) 6].
L’utilisation d’un robot de téléprésence serait meilleure que d’autres outils technologiques dû au fait qu’il peut se déplacer :
Le robot de téléprésence permet d’enseigner de la matière à distance, comme les logiciels [plateformes] Teams et Zoom. Cependant, avec le robot, c’est très différent. L’enseignement est plus dynamique, puisque nous pouvons déplacer le robot dans la salle de classe [étudiant(e) 9].
Un des avantages marquant de l’utilisation du robot de téléprésence est celui de sa pertinence en situation de pandémie alors que l’accès à la salle de classe est très limité ou impossible :
Un des avantages les plus importants a des liens directs avec la pandémie que nous vivons en ce moment, car avec les nombreuses restrictions émises par la sécurité publique nous empêchent d’avoir des contacts avec des gens hors de notre bulle. Nous avons quand même eu la chance d’enseigner avec des jeunes et de vivre une expérience semblable a une vraie présentation en salle de classe malgré les conditions actuelles [étudiant(e) 16].
Il serait même possible d’avoir des conférenciers malgré les restrictions imposées par la pandémie. « Personne ne peut entrer dans des établissements scolaires, donc si quelqu’un veut venir faire une conférence, il peut faire sa présentation avec le robot » [étudiant(e) 5].
Une enseignante ou un enseignant peut s’absenter pour différentes raisons. Dans ce cas, il est alors difficile d’avoir une continuité dans les apprentissages. L’utilisation d’un robot pourrait permettre à une enseignante ou un enseignant à distance d’interagir avec ses élèves :
L’un des avantages est que si l’enseignant ne peut assister à son cours durant la journée, il peut enseigner aux élèves par l’entremise du robot en se connectant sur celui-ci. Le robot utilisé pour enseigner aux élèves [...] peut se déplacer en classe comme l’enseignant et capter l’attention des élèves [étudiant(e) 2].
Finalement, les étudiantes et les étudiants ont souligné que l’utilisation de cet outil technologique pouvait leur faire vivre des situations authentiques avec des élèves sans se déplacer :
Puisque nous ne pouvions pas aller dans les écoles, nous avons quand même eu la chance de voir une réelle situation en salle de classe, mais tout en étant à distance et en utilisant une nouvelle stratégie dont les élèves n’avaient jamais eu la chance de vivre auparavant. Cela nous démontre que nous ne sommes pas toujours obligés de nous déplacer pour vivre des moments authentiques [étudiant(e) 6].
Les étudiantes et les étudiants ont également relevé des désavantages concernant l’utilisation du robot. Ils ont souligné que cette forme d’enseignement limitait les interactions avec les élèves. « Ce genre d’enseignement limite les interactions. Les jeunes élèves ont besoin de cette interaction pour partager leurs connaissances et échanger leur point de vue » [étudiant(e) 10].
Même si le robot peut répondre à plusieurs fonctions en salle de classe, la présence humaine est quand même requise dans certaines situations. « Il doit toujours avoir quelqu’un avec les élèves afin de s’assurer qu’ils sont attentifs à ce qui se passe et de dire aux élèves de rester en silence parce que le volume n’est pas fort » [étudiant(e) 5].
Étant donné que le robot ne peut pas écrire au tableau, l’utilisation du robot limite les démonstrations sur le plan visuel. « L’enseignement avec un robot de téléprésence limite les démonstrations visuelles, qui pour certains, sont primordiales à leur compréhension » [étudiant(e) 10].
Comme mentionné précédemment, le robot peut être une source de motivation étant donné la nouveauté de cette approche. À l’inverse, cette façon de faire pourrait devenir une source de distraction pour les élèves. « Cela peut aussi être une source de distraction pour les élèves, car ils vont être intrigués par le robot et son déplacement et n’écouteront plus le professeur qui parle » [étudiant(e) 2].
Finalement, diverses difficultés sur le plan technique peuvent causer des problèmes dans l’enseignement.
Lorsque je parlais, la connexion a lâché. Donc, la connexion n’est pas fiable à 100 % » [étudiant(e) 3].
Un autre désavantage est que l’on ne voit pas bien les élèves dans la classe. Il peut être difficile de les discerner lorsque le robot n’est pas proche. On ne peut pas voir l’ensemble de la classe en même temps afin de voir les interactions des élèves et être à l’écoute des gestes ou signes de chacun [étudiant(e) 1].
Les étudiantes et les étudiants ont beaucoup aimé enseigner avec le robot et ils ont effectué des apprentissages dans différents domaines. Cette expérience fut donc très positive. Cependant, il y a quand même lieu de se questionner sur les éléments à améliorer concernant les expériences effectuées à partir du robot de téléprésence mobile.
Tout d’abord, les étudiantes et les étudiants ont souligné des éléments qui sont reliés aux apprentissages des élèves. Ils ont mentionné que de présenter le robot aux élèves au préalable aurait permis de diminuer l’agitation des élèves : « Je crois que simplement leur présenter le robot rapidement avant de l’utiliser leur permettait de mieux garder leur attention sur la matière enseignée puisqu’ils savent déjà à quoi s’attendre » [étudiant(e) 4]. Ils ont également souligné l’importance de préparer le matériel à l’avance : « Je demanderais à l’enseignant de préparer le matériel avant de commencer ma présentation afin de ne pas les exciter et de ne pas perdre le contrôle sur leur attention » [étudiant(e) 6].
Pour cette première expérience dans les écoles pour plusieurs étudiantes et étudiants, ils devaient préparer des leçons de courte durée. Il a été souligné qu’ils auraient aimé avoir plus de temps avec les élèves afin d’assurer la participation de tous :
Je crois que l’expérience aurait pu être d’une plus longue durée afin que tous les élèves aient la chance de venir parler au robot, puisque pour eux, c’était un grand évènement et très excitant. Je crois qu’ils auraient tous aimé avoir la chance de parler au robot [étudiant(e) 10].
Dans le but d’améliorer l’expérience vécue par les élèves, il aurait été possible de déplacer davantage le robot :
Un aspect que nous pourrions modifier afin d’améliorer la situation d’apprentissage vécue par les élèves est sans aucun doute de faire bouger le robot davantage. Par exemple, lorsqu’un élève a une question, nous pourrions déplacer le robot à son pupitre. Selon moi, plus le robot imitera le comportement d’un enseignant, c’est-à-dire se déplacer en salle de classe, plus l’enseignement sera intéressant et dynamique pour les élèves. En d’autres mots, ces derniers n’auront pas l’impression de parler à un ordinateur, mais bien à une personne qui se trouve tout simplement à distance [étudiant(e) 8].
Finalement, les étudiantes et les étudiants ont mentionné qu’il aurait fallu faire participer davantage les élèves afin de maintenir l’attention des élèves. « Faire participer les élèves le plus possible afin de pouvoir garder leur attention sur la présentation » [étudiant(e) 6].
En plus des éléments pouvant améliorer les apprentissages des élèves, les étudiantes et les étudiants ont proposé des éléments pouvant améliorer l’expérience étudiante. Ils ont souligné qu’avoir plus de temps de préparation aurait été bénéfique :
Dans mon cas, j’aurais bien aimé avoir plus de temps de préparation. Je sais très bien que c’était hors de notre contrôle cette fois-ci, mais dans le futur, je crois que ça serait bien si les étudiants avaient plus de temps pour se préparer [étudiant(e) 8].
Les étudiantes et les étudiants recommandent également que les matières d’enseignement choisies pour les leçons soient reliées à leurs champs d’intérêt. « De plus, le sujet de matière était hors de mon champ de confort et cela m’a causé un stress de plus » [étudiant(e) 14].
Étant donné qu’il s’agissait des premières expériences en enseignement des étudiantes et étudiants et que ceux-ci sont en début de formation, toutes les compétences concernant la planification de leçons n’ont pas encore été acquises. « J’aurais peut-être aimé apprendre à faire une leçon plutôt que de juste présenter comme une présentation orale normale » [étudiant(e) 13].
Les étudiantes et les étudiants ont soulevé le fait qu’ils auraient aimé recevoir une formation au préalable concernant le fonctionnement du robot. « Offrir une meilleure formation avec le robot serait nécessaire, ce qui permettrait ainsi aux présentateurs de mieux partager le contenu » [étudiant(e) 7].
De plus, ils auraient aimé utiliser et faire fonctionner le robot avant d’enseigner avec celui-ci. « Selon moi, nous devrions peut-être manipuler le robot plus souvent avant d’aller en salle de classe, car nous n’étions pas très habiles lors des déplacements » [étudiant(e) 6].
Finalement, plusieurs étudiantes et étudiants ont indiqué qu’ils ne changeraient rien à cette expérimentation avec le robot. « Je crois que rien ne devrait être changé car c’était une expérience très unique et amusante pour les élèves et aussi pour nous » [étudiant(e) 11].
Je ne pense pas que changer quelque chose soit nécessaire. À mon avis, cette expérience s’est très bien déroulée, nous n’avons eu aucune difficulté avec les élèves et les professeurs n’ont pas eu besoin d’interagir. Je suis convaincu que dans le cadre des cours d’éducation ce genre d’expérience devrait être utilisé beaucoup plus souvent [étudiant(e) 5].
Le point central de cette expérimentation concerne les apprentissages effectués par les étudiantes et les étudiants en éducation. Les résultats montrent clairement que l’utilisation du robot de téléprésence a permis de parachever l’enseignement théorique du cours universitaire. Ceci représente d’ailleurs la raison d’être des expériences pratiques dans le système scolaire. L’utilisation du robot a permis aux étudiantes et aux étudiants de vivre une expérience authentique et d’effectuer des apprentissages sur l’importance de la planification et de la communication, sur la connaissance des programmes d’études ou sur la façon de motiver les élèves lors des leçons.
Les résultats de recherche ont également montré qu’il fut possible d’interagir avec les élèves lors de l’expérimentation avec le robot. Ces interactions furent rendues possibles grâce aux questions posées aux élèves, et surtout, par le déplacement du robot. À cet effet, des recherches (Dussarps et al., 2020; Poyet et al., 2018) soulignent que la mobilité du robot favorise les interactions entre les participantes et les participants. Ces robots de téléprésence furent d’ailleurs conçus pour atteindre cet objectif, soit de permettre des déplacements (Batmaz et al., 2020). Cette méthode d’enseignement est plus interactive que la rencontre en vidéoconférence où la caméra est fixe (Verchier et al., 2023). Comme l’indiquent Verchier et ses collaborateurs (2023), « l’utilisateur qui est à distance pilote le robot et peut donc être acteur de la session à laquelle il participe » (p. 224).
Le principal avantage de l’utilisation du robot est sa mobilité, soit le fait que celui-ci puisse se déplacer comparativement à d’autres plateformes de vidéoconférence qui ne sont pas mobiles (Gallon & Abenia, 2018). Celles-ci peuvent agrandir ou diminuer l’image, mais le robot, lui, peut se déplacer, ce qui représente un avantage pour interagir avec une personne qui se trouve par exemple en arrière dans une classe (Petit et al., 2020). Comme le soulignent Verchier et ses collaborateurs (2023), « les interfaces comme Zoom ou Teams montrent leurs limites en face à face écran [...] c’est-à-dire que l’on constate un manque de mobilisation des sens, comme cela se fait naturellement en présentiel » (p. 223). Cependant, si l’on combine les avantages des plateformes de vidéoconférence qui ne sont pas mobiles (la facilité d’utilisation, la possibilité de partager des documents et la possibilité d’écrire des messages) avec l’avantage principal du robot de téléprésence (la possibilité de déplacement du robot), cette complémentarité représente une perspective très intéressante pour l’enseignement à distance.
Notons également que les étudiantes et les étudiants ont pris plaisir à cette expérience novatrice dans le système scolaire en raison de la motivation des élèves lors de la leçon. Cette motivation peut s’expliquer en partie par l’effet de nouveauté que représente le robot (Poyet et al., 2018).
Les résultats de recherche ont également montré que des problèmes techniques peuvent survenir lors des expériences avec le robot de téléprésence (Poyet et al., 2018). Il faut donc accorder une importance à la préparation technologique avant d’utiliser des robots de téléprésence dans les écoles. À cet effet, il est essentiel qu’une technicienne ou un technicien en informatique fasse au préalable des vérifications de compatibilité entre le robot et les pare-feux présents dans les écoles, car il est possible que des ajustements doivent être apportés afin que le robot soit fonctionnel. À la suite de ces vérifications et ajustements, il est important que les étudiantes et les étudiants fassent des tests à distance pour vérifier la fonctionnalité du robot (la qualité du son, la qualité de l’image, la connexion, le déplacement du robot, etc.).
Le but de l’expérimentation était d’étudier l’enseignement à distance par le biais d’un robot de téléprésence mobile et d’examiner sa contribution à la formation des étudiantes et des étudiants. C’est dans cette perspective que les étudiantes et les étudiants ont constaté l’importance d’une bonne préparation, ont interagi avec des élèves et ont pris conscience du rôle de la motivation dans l’apprentissage. Les expériences pratiques permettent donc de suppléer au manque d’interrelation entre la théorie et la pratique. En ce qui a trait à l’utilisation des technologies dans le milieu de l’éducation, la réflexion doit se poursuivre. Comme l’indique Verchier et ses collaborateurs (2023), « au-delà de la technologie utilisée, il nous semble important, dans le champ de la formation tant initiale que continue, de nous interroger sur les intentions pédagogiques associées à l’utilisation de ces différents outils » (p. 224), et ce, tel qu’il fut le cas dans cette recherche.
Malgré les nombreux bénéfices énumérés, cette étude a comme limite le nombre total d’expériences en salle de classe (11 classes) et le ratio école primaire/école secondaire (cinq écoles primaires par rapport à deux écoles secondaires). Étant donné l’aspect très novateur de cette recherche, d’autres expériences sont nécessaires afin de valider les résultats. À cet effet, les divers éléments proposés dans la section « amélioration des apprentissages (élèves) » et la section « amélioration (expérience étudiante) » seront certainement utiles dans le cadre de nouvelles recherches. Les besoins concernant l’enseignement à distance vont continuer à augmenter (Bates et al., 2018; Petit et al., 2020), d’où l’importance pour les programmes de formation en éducation d’offrir des expériences diversifiées (comme celle avec le robot) qui vont permettre de bien préparer les étudiantes et les étudiants à l’environnement pédagogique du futur (Cirillo et al., 2020).
Bates, T., Donovan, T., Seaman, J., Mayer, D., Martel, É., Paul, R., Desbiens, B., Forssman, V., & Poulin, R. (2018). Évolution de la formation à distance et de l’apprentissage en ligne dans les universités et collèges du Canada : 2018. Sondage national sur la formation à distance et l’apprentissage en ligne. Association canadienne de recherche sur la formation en ligne. https://www.cdlra-acrfl.ca/wp-content/uploads/2020/07/2018_national_fr.pdf
Batmaz, A. U., Maiero, J., Kruijff, E., Riecke, B. E., Neustaedter, C., & Stuerzlinger, W. (2020). How automatic speed control based on distance affects user behaviours in telepresence robot navigation within dense conference-like environments. PLoS ONE, 15(11), 1-41. https://doi.org/10.1371/journal.pone.0242078
Carmichael, J. (2023). Tour d’horizon de possibles utilisations des nouvelles technologies avec des élèves à besoins éducatifs particuliers. La nouvelle revue. Éducation et société inclusive, 3(97), 237-254. https://shs.cairn.info/revue-la-nouvelle-revue-education-et-societe-inclusives-2023-3-page-237?lang=fr
Cirillo, M., Larochelle, R., Arbaugh, F., & Bieda, K. N. (2020). An innovative early field experience for preservice secondary teachers : Early results from shifting to an online model. Journal of Technology and Teacher Education, 28(2), 353-363. https://www.learntechlib.org/p/216305/
Cooper, S., & Nesmith, S. (2013). Exploring the role of field experience context in preservice teachers’ development as mathematics educators. Action in Teacher Education, 35, 165-185. https://doi.org/10.1080/01626620.2013.770376
Desbiens, J. F., Borges, C., & Spallanzani, C. (2009). Investir dans la formation des personnes enseignantes associées pour faire du stage en enseignement un instrument de développement professionnel. Éducation et francophonie, 37(1), 7-26. https://doi.org/10.7202/037650ar
Desbiens, J. F., Correa Molina, E., & Habak, A. (2019). Alternance, discontinuité et difficultés rencontrées en formation initiale des enseignants. Éducation et formation, 314, 69-82. https://orbi.umons.ac.be/bitstream/20.500.12907/6594/1/e_314.pdf#page=69
Dussarps, C., Lehmans, A., Gallon, F., Dubergey, F., & Abénia, A. (2020). La présence à distance dans les pratiques enseignantes : le cas des robots de téléprésence. Éducation, santé, sociétés, 6(2), 123-138. https://dx.doi.org/10.17184/eac.9782813003805
Freiman, V., Lang, M., Boubreau, L. C., Robichaud, X., Basque, M., Levesque, R., Lacroix-Rancourt, E., Lurette, O., & Thériault, K. (2023, 5 mai). Re-imagining teacher education through University-School partnership: Learning about pre-service teachers’ perceptions of theory-to-practice transition [communication orale]. 2023 AERA Annual Meeting, Chicago, USA.
Gallon, L., & Abénia, A. (2018, novembre). Environnements connectés pour robot de téléprésence. WPRT 2018 : 4e workshop pédagogique Réseaux et télécoms, Hendaye, France. https://univ-pau.hal.science/hal-01908227/file/telepresence.pdf
Gervais, C., & Desrosiers, P. (2005). L’école lieu de formation d’enseignants : questions et repères pour l’accompagnement de stagiaires. Presses de l’Université Laval.
Gravett, S., & Ramsaroop, S. (2017). Teaching schools as teacher education laboratories. South African Journal of Childhood Education, 7(1), 1-8. https://doi.org/10.4102/sajce.v7i1.527
Hobson, A. J. (2003). Student teachers’ conceptions and evaluations of theory in initial teacher training (ITT). Mentoring & Tutoring, 11(3), 245-261. https://doi.org/10.1080/1361126032000138300
Horn, I. S., & Campbell, S. S. (2015). Developing pedagogical judgment in novice teachers : Mediated field experience as a pedagogy for teacher education. Pedagogies. An International Journal, 10(2), 149-176. https://www.tandfonline.com/doi/epdf/10.1080/1554480X.2015.1021350?needAccess=true
Jakonen, T., & Jauni, H. (2021). Mediated learning materials : Visibility checks in telepresence robot mediated classroom interaction. Classroom Discourse, 12(1-2), 121-145. https://doi.org/10.1080/19463014.2020.1808496
Khadri, H. O. (2021). University academics’ perceptions regarding the future use of telepresence robots to enhance virtual transnational education : An exploratory investigation in a developing country. Smart Learning Environments, 8(28), 1-19. https://doi.org/10.1186/s40561-021-00173-8
Lehmans, A., Dussarps, C., & Gallon, L. (2020, 6 juillet). Téléprésence en milieux d’apprentissage et accompagnement. [communication orale]. Colloque PRUNE : Perspectives des usages du numérique dans l’éducation, Poitiers, France. https://hal.science/hal-02898141/
Lei, M., Clemente, I. M., Liu, H., & Bell, J. (2021). The acceptance of telepresence robots in higher education. International Journal of Social Robotics, 14, 1025-1042. https://doi.org/10.1007/s12369-021-00837-y
Lepage, M., Karsenti, T., & Grégoire, P. (2015). La formation pratique et les stages au Québec. Formation et profession, 23(3), 187-194. https://doi.org/10.18162/fp.2015.a79
Liao, J., Lu, X., Masters, K. A., Dudek, J., & Zhou, Z. (2022). Telepresence-place-based foreign language learning and its design principles. Computer Assisted Language Learning, 35(3), 319-344. https://doi.org/10.1080/09588221.2019.1690527
Malo, A. (2011). Apprendre en contexte de stage : une dynamique de transformation de son répertoire. Revue des sciences de l’éducation, 37(2), 237-255. https://doi.org/10.7202/1008985ar
McLoughlin, A. S., & Maslak, M. (2003). Prospective teachers’ perceptions of development during fieldwork : Tutoring as a vehicle for professional growth. Teacher Educator, 38(4), 267-284. https://doi.org/10.1080/08878730309555323
Miles, M. B., & Huberman, A. M. (2003). Analyse des données qualitatives (2e éd.). De Boeck Université.
Miles, M. B., Huberman, A. M., & Saldaña, J. (2014). Qualitative data analysis. A methods sourcebook (3e éd.). SAGE Publications.
Paillé, P., & Mucchielli, A. (2021). L’analyse qualitative en sciences humaines et sociales (5e éd.). Armand Colin.
Patroucheva, M. (2014). La professionnalisation à l’université malade de la stagification : à qui profite le stage? Éducation et socialisation, 35. https://doi.org/10.4000/edso.719
Pelletier, J.-P. (2020). Mise au point d’exercices visant le développement d’habiletés interactives chez des stagiaires en enseignement. Revue des sciences de l’éducation de McGill, 55(2), 397-416. https://doi.org/10.7202/1077974ar
Petit, M., Lameul, G., & Taschereau, J. (2020). La téléprésence en formation. Définitions et dispositifs issus d’une recension systématique des écrits. Médiations et médiatisations, 3, 7-20. https://eduq.info/xmlui/bitstream/handle/11515/37920/Petit-et-al-telepresence-en-formation-definitions-dispositifs-issus-recension-ecrits.pdf?sequence=2
Poyet, F., Hachani, M. E., & Darlington, E. (2018). Retours d’usages sur les robots de téléprésence en éducation. Note de synthèse du rapport final ELICO. https://hal.science/hal-01798556/
Rinaudo, J.-L. (2018). Robots de téléprésence et intersubjectivation. L’évolution psychiatrique, 83, 427-434. https://doi.org/10.1016/j.evopsy.2018.01.001
Selen Kula, S., & Demirci Güler, M. P. (2021). University-school cooperation : Perspectives of pre-service teachers, practice teachers and faculty members. Asian Journal of University Education, 17(1), 47-62. https://doi.org/10.24191/ajue.v17i1.12620
Tardif, M., Borges, C., & Tremblay-Gagnon, D. (2021). Enseigner aujourd’hui : du choix de la carrière aux premières années dans le métier. Presses de l’Université de Montréal.
Van der Maren, J.-M. (2014). La recherche appliquée pour les professionnels. Éducation, (para)medical, travail social. De Boeck Supérieur.
Verchier, Y., Lison, C., & Duvivier, C. (2023). Technologies immersives et acquisition de compétences : une discussion. Médiations et médiatisations, 15, 221-229. https://revue-mediations.teluq.ca/index.php/Distances/article/view/347
Marc Basque, Ph.D., est professeur agrégé en Éducation à l’Université de Moncton, campus d’Edmundston. Il est co-auteur des ouvrages Professional learning communities. Competency standards for school principals (2020) et Communauté d’apprentissage professionnelles. Profil de compétences des directions d’établissement d’enseignement (2019). Ses recherches portent sur l’efficacité des écoles, les communautés d’apprentissage professionnelles, l’utilisation des robots de téléprésence dans l’enseignement universitaire ainsi que la perception des élèves envers la profession enseignante. Courriel : marc.basque@umoncton.ca
Xavier Robichaud, Ph.D., est professeur adjoint en Éducation à l’Université de Moncton, campus de Shippagan. Ses recherches portent sur la pédagogie et la mesure de la créativité, les technologies éducatives et la formation artistique, notamment en musique. Courriel : xavier.robichaud@umoncton.ca
Robert Levesque, Ph.D., est professeur titulaire à l’Université de Moncton campus Edmundston. Il est auteur du livre Journal intime d’une enseignante au primaire. Il fut récipiendaire du Prix national Microsoft Innovative Teacher en 2007 ainsi que du prix Excellence en Enseignement en 2016. De plus, il fut récipiendaire de la Médaille du jubilé de platine d’Elizabeth II en 2023. Ses recherches portent sur le vécu du personnel enseignant dans le milieu scolaire ainsi que la perception des élèves envers la profession enseignante. Courriel : robert.levesque@umoncton.ca
Lyne Chantal Boudreau, Ph.D., est professeure en administration de l’éducation qui se distingue par son engagement en milieu éducatif. Lauréate de distinctions, ses implications professionnelles et bénévoles favorisent des approches inclusives, innovantes et respectueuses. Co-auteure du livre Le leadership partagé au service de la réussite éducative, elle valorise l'apprentissage, la justice sociale et l’intersectionnalité. Courriel : lyne.c.boudreau@umoncton.ca
Mathieu Lang, Ph.D., est Doyen de la Faculté des sciences de l’éducation de l’Université de Moncton où il est professeur depuis 2004. À la Faculté des sciences de l’éducation, il donne les cours de fondements de l’éducation, d’apprentissage et enseignement et d’éducation à la citoyenneté. En recherche, il s’intéresse aux fondements de l’éducation, au développement de la pensée critique, à l’éducation à la citoyenneté, à la philosophie avec les enfants et les adolescents ainsi qu’à la relation théorie-pratique dans la formation en enseignement. Courriel : mathieu.lang@umoncton.ca
Viktor Freiman, Ph.D., est professeur titulaire à la Faculté des sciences de l’éducation de l’Université de Moncton. Ses intérêts de recherche se concentrent en didactique des mathématiques, en développement de compétences numériques, en étude de pratiques innovantes intégrant les TIC et l’apprentissage inter- et transdisciplinaire. Il est le directeur du Réseau des partenaires CompeTI.CA (Compétences en TIC en Atlantique). Il est également co-responsable des symposiums internationaux MACAS (Mathematics and its Connection with the Arts and Science) et co-directeur de la collection des livres chez Springer Mathematics Education in the Digital Era. Courriel : viktor.freiman@umoncton.ca