
Raoul Kamga, Université du Québec à Montréal, Canada
Sylvie Barma, Université Laval, Canada
Frédéric Fournier, Université du Québec à Montréal, Canada
Pierre Lachance, Réseau éducation collaboration innovation technologie, Canada
Joelle Bérubé-Daigneault, Université du Québec à Montréal, Canada
Sarah Cool-Charest, Université de Montréal, Canada
La capacité à résoudre des problèmes de manière collaborative constitue une compétence fondamentale pour les élèves du primaire. Les travaux de recherche se sont majoritairement focalisés sur l’analyse et l’évaluation de cette compétence chez les élèves du primaire. Cependant, peu d’attention a été portée au processus de conception des tâches visant à favoriser le développement de la résolution collaborative de problèmes chez ces élèves. Pourtant, la résolution collaborative de problèmes ne peut émerger de manière pertinente que si les tâches sont conçues de manière à encourager les élèves à collaborer. Cette recherche se concentre spécifiquement sur le processus de conception des tâches liées à la robotique pédagogique et utilise, comme cadre théorique, la théorie de l’activité d’Engeström. Les participants, composés d’enseignants du primaire et de conseillers pédagogiques, ont répondu à un questionnaire portant sur leur démarche de conception de tâches et ont participé à deux entrevues de groupes. Les résultats soulignent que la conception des tâches de robotique pédagogique, qui vise à développer la résolution collaborative de problèmes chez les élèves, est tributaire des habiletés technologiques et de conception de tâches en robotique pédagogique de la personne conceptrice. Les règles régissant la conception des tâches de robotique pédagogique incluent le temps nécessaire à leur mise en place et le travail d’équipe.
Mots-clés : conception des tâches, formation des enseignants, résolution collaborative de problèmes, robotique pédagogique, théorie de l’activité
A fundamental skill for primary school students is the ability to solve problems collaboratively. Most research has focused on the analysis and assessment of this skill in primary school students. However, little attention has been paid to the process of designing tasks to foster the development of collaborative problem-solving in these students. Furthermore, collaborative problem-solving can only emerge in a meaningful way if the tasks are designed in such a way as to encourage students to collaborate. This research focuses specifically on the process of designing tasks related to educational robotics, using the theoretical framework of Engeström’s activity theory. Participants, made up of primary school teachers and educational consultants, completed a questionnaire about their task design process and took part in two group interviews. The results highlight that the design of educational robotics tasks, aimed at developing collaborative problem-solving in students, is dependent on the technological and educational robotics task design skills of the designer. The rules governing the design of educational robotics tasks include the time needed to set them up and teamwork.
Keywords: activity theory, collaborative problem-solving, educational robotics, task design, teacher education
La résolution collaborative de problèmes attire de plus en plus l’attention tant au niveau national qu’international (Bergner et al., 2016; Dindar et al., 2022; Kamga, 2019; OCDE, 2013). Cette compétence revêt une importance cruciale pour les élèves du primaire en les préparant à collaborer efficacement avec leurs pairs ou membres de leur famille pour surmonter des défis quotidiens. Elle revêt également une importance significative dans leur vie quotidienne, afin qu’ils puissent par la suite évoluer dans un monde saturé d’informations, ainsi que sur le plan professionnel, en lien avec de nombreux emplois exigeant la résolution de problèmes complexes au sein d’équipes (Siddiq & Scherer, 2017).
Bien que la recherche se soit penchée sur le développement de la compétence de résolution collaborative de problèmes chez les élèves du primaire (Avry et al., 2018), elle accorde peu d’attention au processus de conception des tâches favorisant cette compétence. De plus, les articles qui décrivent les tâches pouvant développer la résolution collaborative de problèmes se concentrent principalement sur des simulations (Care et al., 2015; Warneken et al., 2014) ou effectuent une analyse théorique des tâches de robotique pédagogique (Kamga et al., 2017). Par ailleurs, les tâches analysées dans les études consultées ne sont pas systématiquement réalisées en classe avec des élèves, mais plutôt en contexte parascolaire (Romero & DeBlois, 2022). Ces recherches n’intègrent pas le point de vue des concepteurs de tâches de robotique pédagogique, ne se penchent pas sur le processus de conception de ces tâches et les facteurs susceptibles de les influencer.
Dans cet article, en nous basant sur le retour d’expérience des concepteurs de tâches de robotique pédagogique, nous présentons les facteurs qui influent sur le processus de conception des tâches visant à développer la résolution collaborative de problèmes chez les élèves du primaire en contexte scolaire.
La résolution collaborative de problème est une compétence mobilisant la collaboration et de la résolution de problèmes (Unal & Cakir, 2021). Son développement implique l’engagement d’un groupe d’apprenants dans la résolution d’un problème (OCDE, 2013). Ainsi, la résolution collaborative de problèmes sollicite chez l’individu des habiletés cognitives et sociales (Care et al., 2015; Hesse et al., 2015; Zhang et al., 2022). Selon Hesse et al. (2015), les habiletés cognitives sont celles reliées à la résolution de problèmes tandis que les habiletés sociales sont associées à la collaboration. Les habiletés cognitives sont caractérisées par la construction des connaissances et la régulation de la tâche et de l’apprentissage. Quant aux habiletés sociales, elles sont dimensionnées par la régulation sociale, la participation et la prise de perspective.
Diverses études ont exploré la résolution collaborative de problèmes, certaines la considérant comme une méthode d’apprentissage et d’enseignement (Unal & Cakir, 2021; Yin et al., 2011), d’autres comme une compétence à développer (Dindar et al., 2022; Graesser et al., 2018; Hesse et al., 2015; OCDE, 2013; Song, 2018). Notre étude s’inscrit dans la perspective de la considérer comme une compétence à développer. Les recherches précédentes sur le développement de cette compétence ont exploré sa mesure et son évaluation (Rojas et al., 2021; Zhang et al., 2022), la charge cognitive des participants de l’équipe (Kolfschoten et al., 2014), sa modélisation (Bergner et al., 2016), et les caractéristiques des tâches qui favorisent son développement (Care et al., 2015; Kamga et al., 2017; Nieminen et al., 2022; Warneken et al., 2014). Ainsi, ces études se sont principalement concentrées sur la compréhension de la compétence ou sur les aspects spécifiques des tâches. Les tâches visant à développer la résolution collaborative de problèmes doivent être ouvertes (Nieminen et al., 2022), mal structurées (Unal & Cakir, 2021), complexes (Graesser et al., 2017, 2018) et authentiques, reproduisant ainsi des expériences de la vie réelle (Siddiq & Scherer, 2017).
La conception des tâches d’apprentissage a fait l’objet de plusieurs recherches en éducation (Cevikbas & Kaiser, 2021; De Hei et al., 2016; Oliver & Higgins, 2023). Selon Watson et Ohtani (2015), la conception de la tâche proposée aux élèves peut améliorer leurs apprentissages et la qualité de leur expérience envers la discipline. Il existe plusieurs facteurs qui peuvent influencer la conception des tâches d’apprentissage. Selon Sullivan et al. (2015) dans le cadre des apprentissages de la mathématique, la conception de la tâche peut dépendre de la pédagogie prévue par l’enseignant, de ses connaissances dans l’enseignement de la discipline, de son rôle et de son niveau d’autonomie dans le processus de conception et de réalisation de la tâche, de la culture du milieu et celle de la salle de classe. Ces facteurs abordent soit la dimension « enseignant » ou celle de la classe, mais ne présentent pas les caractéristiques intrinsèques de la tâche. Dans le cadre de la conception des tâches qui impliquent la collaboration, l’étude de De Hei et al. (2016) souligne cinq caractéristiques des tâches à utiliser en classe : significative pour les élèves, utilisant un matériel authentique, stimulante pour les élèves, inciter les élèves à discuter et à échanger des idées et expériences, et favorisant le travail collaboratif. Ces caractéristiques ont été mentionnées par les enseignants et ne concernent que les facteurs liés à l’élève. Bien que plusieurs études aient abordé la conception des tâches, il est pertinent d’accroître les connaissances scientifiques spécifiques à la conception de tâches permettant la résolution collaborative de problèmes. Cependant, la conception des tâches liées à l’utilisation par les élèves d’objets technologiques tels que les robots pédagogiques n’est pas abordée.
Introduite par Papert (1980) et ancrée dans le concept de constructionnisme, l’utilisation de la robotique pédagogique représente l’une des premières incursions du numérique dans le domaine éducatif. Depuis son introduction par Papert (1980) dans le contexte éducatif, les usages de la robotique pédagogique ont évolué, car ils étaient initialement axés sur le développement du raisonnement mathématique des élèves. La robotique pédagogique se définit comme la conception ou la programmation d’un robot éducatif dans le but d’atteindre des objectifs d’apprentissage spécifiques ou d’acquérir des compétences particulières (Kamga, 2019). Les robots éducatifs, prenant diverses formes telles que des machines industrielles, des représentations humaines ou animales (Atman Uslu et al., 2022), sont de plus en plus intégrés dans les environnements scolaires. Les tâches de robotique pédagogique offrent la possibilité de mobiliser des concepts issus de plusieurs disciplines, notamment les mathématiques, les sciences, la technologie et l’ingénierie (Atman Uslu et al., 2022; Leroy & Romero, 2022).
Ces tâches sont aussi intégrées dans l’enseignement afin de favoriser le développement de la pensée informatique (Chen et al., 2017; Papadakis & Kalogiannakis, 2022), de stimuler la créativité (Leroy & Romero, 2022), et d’encourager la résolution collaborative de problèmes chez les élèves (Kamga et al., 2017; Socratous & Ioannou, 2022; Taylor & Baek, 2018). Les recherches ont souligné la contribution positive de la robotique pédagogique au développement de la résolution collaborative de problèmes (Atman Uslu et al., 2022). Néanmoins, ces études ne se penchent pas sur la phase de conception des tâches de robotique pédagogique utilisées dans les classes du primaire, et qui ont pour objectif de promouvoir le développement de la résolution collaborative chez les élèves. Notre étude a pour but de contribuer à la compréhension des facteurs qui peuvent influencer la conception des tâches de robotique pédagogique destinées à la résolution collaborative de problèmes par les élèves.
Le cadre théorique de cette recherche repose sur la théorie de l’activité. Sachant qu’une activité de conception de la tâche pourrait tenir compte de la personne qui conçoit, du contexte culturel et social dans lequel elle va se réaliser et potentiellement de plusieurs autres dimensions, la théorie de l’activité est pertinente pour cette recherche. Cette théorie a été développée dans les travaux d’Engeström et utilisée par plusieurs études en éducation (Engeström, 1999; Engeström & Pyörälä, 2021; Sannino, 2015). De manière générale, cette théorie offre une perspective éclairante sur l’activité humaine, et plus spécifiquement sur notre étude portant sur la conception des tâches de robotique pédagogique. Elle la considère comme ancrée dans un contexte socio-culturel, caractérisé et explicable par un système d’activité (DeVane et Squire, 2012; Engeström & Pyörälä, 2021). Ce système d’activité se compose de sept éléments fondamentaux : le sujet, les outils, l’objet, les règles, la division du travail, la communauté et le résultat.
Le sujet représente une personne ou une collectivité engagée dans l’activité, tandis que l’objet en est l’élément déterminant et orientant, permettant de distinguer une activité d’une autre. Les outils, également appelés artefacts, agissent en tant que médiateurs de l’activité et sont utilisés par le sujet. La communauté désigne l’ensemble des individus impliqués dans l’activité, entre lesquels le travail est réparti. La division du travail offre des indications sur le rôle de chaque membre de la communauté et sur la structure de celle-ci. Le résultat représente l’état désiré de l’objet de l’activité lorsqu’il est transformé par cette dernière. La figure 1 ci-dessous illustre le système d’activité (Engeström, 1987).
Figure 1
Système d’activité
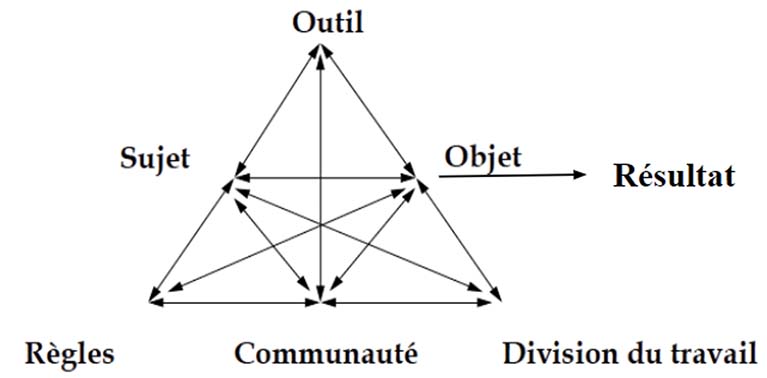
Note. Engeström, 1987.
Ce système d’activité permet une compréhension multidimensionnelle de l’activité en examinant les perspectives du sujet, des outils, de l’objet, de la communauté, des règles et de la division du travail. Cette représentation triangulaire englobe à la fois la médiation individuelle par les outils et les éléments associés à la médiation socio-culturelle, à savoir les règles et la division du travail au sein de la communauté participant à l’activité (Engeström, 1987).
Dans le cadre de la présente recherche, le système d’activité sera mobilisé pour explorer les différentes dimensions mentionnées afin d’identifier les facteurs impliqués dans la conception des tâches de robotique pédagogique permettant le développement de la résolution collaborative de problèmes chez les élèves du primaire.
Cette étude est articulée autour de quatre questions de recherche spécifiques (QR), qui se structurent comme suit :
Les participants engagés dans cette étude se composent d’enseignants ainsi que de conseillers pédagogiques exerçant dans le domaine de l’enseignement primaire. L’échantillonnage a été déterminé par une condition préalable unique : chaque participant devait avoir préalablement modifié ou conçu une tâche de robotique pédagogique visant à favoriser le développement de la résolution collaborative de problèmes chez les élèves du primaire. Cette condition implique que les participants possèdent une expertise techno-pédagogique spécifique en ce qui concerne l’intégration de la robotique pédagogique dans leur pratique éducative.
Un total de 25 participants ont pris part à notre enquête, dont 8 enseignants et 17 conseillers pédagogiques. Le tableau 1 présente les caractéristiques des participants.
Tableau 1
Caractéristiques des participants
| Caractéristiques des participants | Effectif | ||
| Niveau de maîtrise des habiletés technologique d’intégration de la robotique pédagogique | Débutant | 5 | 25 |
| Intermédiaire | 6 | ||
| Avancé | 7 | ||
| Pas de réponse | 7 | ||
| Nombre d’années d’expérience en conception ou modification des activités de robotique pédagogique | De 0 à 3ans | 7 | 25 |
| De 4 à 7 ans | 6 | ||
| 8 ans et plus | 12 | ||
| Pas de réponse | 0 | ||
La collecte de données s’est effectuée au moyen d’un questionnaire élaboré par l’équipe de recherche, complété par deux séances d’entrevue de groupe. Ce questionnaire, majoritairement constitué de questions ouvertes, comportait une section relative à l’expérience des participants dans le domaine de l’enseignement et de la conception des tâches de robotique pédagogique. D’autres sections du questionnaire étaient structurées conformément aux axes du système d’activité (sujet, outils, objet de l’activité, division du travail, communauté et règles). Par exemple, il y avait des questions qui demandaient aux participants de décrire les caractéristiques des robots, des élèves, de la salle de classe, de la communauté, qui étaient susceptibles d’influencer leur conception des tâches de robotique pédagogique. L’équipe de recherche estimait que le temps nécessaire pour y répondre était d’environ 30 minutes. Les participants avaient accès au questionnaire via la plateforme LimeSurvey. Parmi les 17 conseillers pédagogiques, 9 ont répondu à l’intégralité des questions posées, tandis que parmi les 8 enseignants, seuls 2 l’ont fait.
À l’issue de la phase du questionnaire, deux enseignantes et trois conseillères pédagogiques ont consenti à poursuivre leur participation au projet en s’engageant dans une série de deux entretiens de groupe. Les résultats de l’analyse des réponses au questionnaire ont été exploités et présentés aux participants afin de diriger les discussions lors de la première séance d’entretien de groupe. Quant à la seconde séance d’entretien de groupe, elle a été orientée par les résultats issus de l’analyse des transcriptions vidéo de la première séance.
La méthodologie d’analyse de données adoptée dans cette étude repose sur l’analyse de contenu, conformément aux principes énoncés par Barma (2008) et L’Écuyer (1990). Bien que les grandes catégories aient été préalablement déterminées en tant que pôles du système d’activité, les éléments constitutifs de ces catégories ont été obtenus par une analyse émergente. Cette dernière a consisté en l’organisation des éléments caractérisant chaque catégorie, réalisée par un membre expérimenté de l’équipe de recherche (C1).
Dans un second temps, un autre membre de l’équipe (C2) a été chargé de confirmer ou d’infirmer les résultats obtenus lors de la première analyse. Ceci a conduit à une deuxième version des résultats. Une réunion entre ces deux membres de l’équipe (C1 & C2) et un troisième membre plus expérimenté (C3) a permis d’obtenir la troisième version des résultats. La quatrième version des résultats a été établie au cours d’une ultime réunion impliquant C3 et trois autres membres de l’équipe (C4, C5, & C6). Cette quatrième version a fait l’objet d’une confrontation auprès des participants lors de la première séance d’entretien de groupe. L’analyse des données issues de la transcription de cette première séance d’entretien de groupe a conduit à l’obtention d’une cinquième version des systèmes d’activité. Cette cinquième version a été soumise aux mêmes participants lors de la deuxième séance d’entretien de groupe. L’analyse des transcriptions de la deuxième séance d’entretien de groupe a permis d’obtenir la sixième et dernière version des résultats. C’est cette dernière version des résultats qui est présentée dans cet article.
Nous présentons les résultats conformément aux questions de recherche spécifiques énoncées dans la section prévue à cet effet.
Nous débutons en réitérant la question de recherche QR1 : « Quelles sont les “caractéristiques individuelles des concepteurs” susceptibles d’influencer la conception d’une tâche de robotique pédagogique visant le développement de la résolution collaborative de problèmes chez les élèves de l’enseignement primaire (QR1)? »
Les résultats à cette question indiquent deux caractéristiques individuelles susceptibles d’exercer une influence sur la conception d’une tâche de robotique pédagogique visant le développement de la résolution collaborative de problèmes chez les élèves du primaire : 1) habileté à créer les tâches et 2) niveaux de connaissances en robotique (habiletés technologiques en robotique pédagogique).
Cette caractéristique a été exclusivement relevée par les enseignants. En effet, d’après leur perspective, leur compétence à concevoir des tâches influence la manière dont ils créent celles liées à la robotique pédagogique. Selon leur témoignage, « cette aptitude s’accroît avec les années et joue un rôle crucial dans le degré d’ouverture des tâches élaborées ». Cette observation peut s’expliquer par le fait que plusieurs enseignants, au début de leur carrière ou lors de l’intégration initiale d’un nouvel outil pédagogique, optent pour l’utilisation de tâches déjà existantes.
Les conseillers pédagogiques ont mis en exergue l’importance de leur niveau de connaissances spécifiques à la robotique. En d’autres termes, leurs compétences technologiques dans le domaine de la robotique pédagogique guideront le processus de conception des tâches visant à développer la résolution collaborative de problèmes chez les élèves du primaire. Selon les conseillers pédagogiques, leur niveau de connaissances du robot leur confère la capacité de concevoir des tâches plus variées, voire nécessitant des programmes informatiques plus complexes, comme en témoigne l’extrait suivant : « [...] le niveau de maîtrise permet de créer des tâches plus variées ».
La seconde question spécifique de recherche (QR2) porte sur les « artefacts » qui peuvent influencer la conception d’une tâche de robotique pédagogique visant le développement de la résolution collaborative de problèmes chez les élèves du primaire. Les résultats de l’étude mettent en lumière cinq artefacts qui peuvent influencer la conception de ces tâches : le curriculum scolaire, le robot pédagogique, l’espace physique de la classe, le logiciel de programmation, ainsi que la pédagogie prévue par le concepteur de la tâche.
La conception d’une tâche de robotique pédagogique visant à favoriser le développement de la résolution collaborative de problèmes au sein d’un contexte de classe requiert l’intégration des éléments du curriculum scolaire. En effet, ces éléments offrent une orientation précieuse au concepteur de la tâche en identifiant les notions disciplinaires à mobiliser par les élèves, ainsi que le niveau de difficulté qu’ils peuvent rencontrer. De plus, le curriculum permet d’assurer que la tâche proposée est en cohérence avec les attentes scolaires. L’extrait du verbatim de la deuxième séance d’entretien de groupes le souligne :
Et on juge que plus l’activité est bien planifiée, plus on a anticipé les différents obstacles, plus on va être capable de bien répondre à notre intention pédagogique, car on a vraiment ciblé quelque chose de précis. Donc au lieu d’aller essayer d’intégrer tout le multidisciplinaire [...].
Les enseignants et les conseillers pédagogiques ont mis en exergue que le choix du robot pédagogique à utiliser dans une tâche de robotique exerce une influence sur la conception de ladite tâche. Lors du processus de conception, ils veillent à ce que le robot envisagé soit disponible au sein des écoles ou qu’il présente un coût raisonnable. Outre le prix et la disponibilité du robot à intégrer dans la tâche à concevoir, ils tiennent compte de la facilité d’utilisation du robot, ainsi que de ses caractéristiques physiques et technologiques. Ces dernières englobent des aspects tels que la taille et la robustesse des composants du robot, l’autonomie et l’accessibilité de la batterie, la solidité et les possibilités d’utilisation offertes par le robot. Les deux extraits ci-dessous du verbatim de la première séance d’entretien de groupe le soulignent.
Je pense que ça ressort en pensant à ce qu’il faut que je connaisse quelles sont les caractéristiques du robot pour pouvoir me positionner avec mon intention pédagogique [...].
[...] bien quand on ne sait pas ce que le robot est en mesure de faire, c’est extrêmement difficile d’aller concevoir des problèmes qui vont aller chercher différentes options [...].
Les tâches de robotique pédagogique visant le développement de la compétence de résolution collaborative de problèmes des élèves du primaire qui sont conçues pour être réalisées en classe dépendent de l’espace physique disponible. Les participants à cette recherche mettent en exergue la relation entre la taille du robot, la tâche conçue et l’espace physique disponible en classe pour la réalisation de la tâche. Cet extrait de la première séance de l’entrevue en témoigne :
Puis, j’ajouterai également l’environnement physique. Est-ce que notre classe est assez spacieuse pour qu’on puisse mettre en place des activités? Des fois on a une toute petite classe, beaucoup d’élèves et juste pas possible. Alors ça, c’est quelque chose que j’ajouterai pour les enseignants.
En fait, pour pallier la limite de l’espace physique disponible dans la salle de classe, les participants soulignent la possibilité de considérer le corridor et les gymnases de l’école dans la conception de la tâche ou alors d’avoir recours à des robots de petite taille. Ce qui peut influencer la tâche de robotique pédagogique à concevoir.
Le logiciel de programmation qui sera utilisé pour donner des instructions au robot joue un rôle important lors de la conception des tâches de robotique pédagogique. Le langage de programmation du logiciel (environnement de programmation) peut permettre de complexifier la tâche de robotique pédagogique. La langue utilisée par le logiciel de programmation est considérée par les participants comme étant une caractéristique du logiciel qui influence la conception de la tâche. Par exemple, dans un contexte francophone, l’utilisation d’un logiciel de programmation de langue anglaise augmenterait la complexité de la tâche pour les élèves. En plus de toutes ces caractéristiques du logiciel de programmation, les participants ont souligné les aspects éthiques relatifs au logiciel de programmation du robot. Ce dernier élément est pertinent pour les concepteurs, car la tâche proposée doit tenir compte de la protection des données des élèves telles que les adresses courriel, noms et âges. L’extrait de la première séance des entrevues de groupe souligne ces aspects éthiques.
Concernant les enseignants, je suis vraiment d’accord avec ça. [...] on a vraiment été sensibilisé également aux enjeux éthiques, à la protection des données des élèves. [...] Donc je pense que c’est un élément important à ajouter; enjeux éthiques des logiciels de programmation.
La pédagogie prévue par les conseillers pédagogiques ou par les enseignants influence la conception de la tâche de robotique pédagogique visant le développement de la résolution collaborative de problèmes. Elle permet à l’enseignant de structurer la tâche de robotique pédagogique pour faciliter la résolution collaborative de problèmes par les élèves. En effet, dans l’exemple d’une pédagogie mettant en avant la différenciation pédagogique, les participants soulignent qu’ils créent des tâches avec plusieurs niveaux de complexités croissantes. Dans le cas où la pédagogie intègre l’interdisciplinarité, la tâche créée mobilisera les notions de plusieurs disciplines comme en témoigne cet extrait de la première séance de l’entrevue : « Puis je crois beaucoup à la pédagogie STEAM comme science, technologie, ingénierie, mathématiques. Je pense que ça nous permet d’aborder la résolution des problèmes en intégrant différentes matières. »
La troisième question spécifique de recherche porte sur « les règles » qui peuvent influencer la conception d’une tâche de robotique pédagogique visant le développement de la résolution collaborative de problèmes chez les élèves de l’enseignement primaire (QR3)?
L’analyse des données a révélé deux règles pouvant exercer une influence sur la conception des tâches de robotique pédagogique visant à développer la résolution collaborative de problèmes chez les élèves du primaire. Les enseignants et les conseillers pédagogiques ont tous deux souligné ces deux règles : le travail en équipe et la durée de l’activité.
Lors de la conception des tâches de robotique pédagogique visant le développement de la résolution collaborative de problèmes chez les élèves du primaire, les enseignants et les conseillers pédagogiques établissent comme règle que la tâche doit être réalisée en équipe d’élèves. La structuration ou la modification des rôles des élèves dépendrait donc de la complexité des tâches. L’extrait suivant de la deuxième séance d’entrevue le démontre :
Lorsque je conçois une activité d’apprentissage, la formation de mes équipes va être drôlement importante. [...] le fait de former les équipes avec des profils d’élèves qui sont homogènes, va favoriser beaucoup au niveau de la collaboration et le travail dans la zone proximale de développement [...].
Le développement de la compétence de résolution collaborative de problèmes requiert du temps. Les enseignants et les conseillers pédagogiques reconnaissent l’importance de la durée allouée à la réalisation de la tâche en classe. En effet, la conception de la tâche de robotique pédagogique doit prendre en considération le temps nécessaire pour le rangement, la mise en place, et la gestion des outils robotiques, ainsi que celui accordé à sa réalisation effective. Il est important de considérer la durée de l’activité de robotique pédagogique à réaliser. L’extrait de la première séance d’entrevue le mentionne : « [...] donc lorsqu’on planifie l’activité, on devrait vraiment s’assurer d’avoir un temps de réserver à chacune des étapes. Donc, à l’étape de la préparation, [...] un moment pour vivre l’activité, mais vraiment de se réserver une période de qualité [...] ».
La quatrième question spécifique de recherche aborde les « caractéristiques propres aux élèves » qui peuvent influencer la conception d’une tâche de robotique pédagogique visant le développement de la résolution collaborative de problèmes des élèves de l’enseignement primaire (QR4)?
Les enseignants et les conseillers pédagogiques ont souligné que la conception des tâches de robotique pédagogique peut être influencée par deux caractéristiques propres aux élèves : la zone proximale de développement et l’intérêt des élèves.
Les conseillers pédagogiques et les enseignants ont souligné la zone proximale de développement des élèves comme étant importante pour cibler la complexité adéquate de la tâche à concevoir. La différence d’approche entre enseignants et conseillers pédagogiques réside dans la méthode d’identification de cette zone proximale de développement. Lors de la conception de l’activité, les conseillers pédagogiques se fondent sur leur expérience pour déterminer ce qui pourrait constituer la zone proximale de développement des élèves, sans cibler spécifiquement un groupe d’élèves dans un contexte bien défini. Par exemple, la tâche sera destinée aux élèves de troisième année du primaire en général plutôt qu’à ceux de troisième année d’une classe en particulier. À l’inverse, lorsqu’ils conçoivent la tâche, les enseignants tiennent compte de la zone proximale de développement des élèves auxquels ils enseignent. Ainsi, la tâche est davantage adaptée aux élèves spécifiques de la classe de l’enseignant. L’extrait suivant, tiré du verbatim de la séance 2, souligne l’importance de la zone proximale de développement des élèves lors de la conception des tâches de robotique pédagogique :
Donc par rapport à ces capacités, par rapport à son bagage. Je ne sais pas, à mon sens à moi, le fait ce qu’il va devoir apprendre nécessite la collaboration ou si c’est carrément là-dessus qu’on mise. Bien oui il faut en tenir compte de sa zone proximale de développement.
Cette caractéristique est exclusivement mise en avant par les enseignants. Du fait de leur proximité et de leurs interactions fréquentes avec leurs élèves, les enseignants ont une connaissance approfondie des centres d’intérêt de ces derniers. En conséquence, ils sont en mesure de concevoir des tâches qui résonnent de manière significative avec leurs élèves. Comme le dit l’enseignante dans cet extrait de verbatim de la première séance d’entrevue, « premièrement déjà quand on conçoit une tâche, on regarde aussi les intérêts, [...] donc on y va avec les intérêts des élèves. [...] Donc je dois mettre des éléments pour susciter leur intérêt. » Le tableau 2 présente la synthèse des résultats.
Tableau 2
Synthèse des résultats
| Questions de recherche | Résultats |
| Quelles sont les caractéristiques individuelles des concepteurs qui sont susceptibles d’influencer la conception d’une tâche de robotique pédagogique (QR1)? |
|
| Quels sont les outils qui peuvent influencer la conception d’une tâche de robotique pédagogique (QR2)? |
|
| Quelles sont les règles qui peuvent influencer la conception d’une tâche de robotique pédagogique (QR3)? |
|
| Quelles sont les caractéristiques propres aux élèves qui peuvent influencer la conception d’une tâche de robotique pédagogique (QR4)? |
|
Cette section est structurée autour des différentes questions de recherche abordées dans ce texte et interprète les résultats à la lumière de la théorie de l’activité (Engeström, 1987, 1999) et des études précédentes.
Selon la théorie de l’activité, les caractéristiques individuelles du sujet sont importantes dans la réalisation d’une activité (Engeström, 1987, 1999). Nos sujets dans cette étude sont les enseignants et les conseillers pédagogiques. Les résultats de recherche soulignent que les caractéristiques individuelles des enseignants susceptibles d’influencer la conception des tâches de robotique pédagogiques visant la résolution collaborative de problèmes par les élèves sont différentes de celles des conseillers pédagogiques. Dans le cas des enseignants, il faut considérer les habiletés à créer les tâches de robotique pédagogique, alors que dans celui des conseillers pédagogiques, ce sont les habiletés technologiques. La caractéristique identifiée chez les enseignants est en accord avec les études de Sullivan et al. (2015) dans le cadre des tâches de mathématiques. Quant à celle décelée chez les conseillers pédagogiques, elles sont une contribution de notre étude. L’aisance à créer les tâches demandées dans le cas des enseignants s’expliquerait par leurs années d’expérience en enseignement. Quant aux conseillers pédagogiques mobilisés dans cette étude, ils possèdent de nombreuses années d’expérience en enseignement, et la nature de leur rôle à l’école les positionne comme des experts en mobilisation pédagogique du numérique auprès des enseignants.
Pour une meilleure conception des tâches de robotique pédagogique visant la résolution collaborative de problèmes, il serait pertinent de mobiliser les enseignants et les conseillers pédagogiques pour faire la co-conception ou d’améliorer les habiletés des enseignants à créer des tâches de robotique pédagogique.
L’activité du sujet est médiatisée par les artefacts (Engeström & Pyörälä, 2021). Les résultats de cette étude présentent plusieurs artefacts dont certains sont directement liés au robot : les caractéristiques du robot pédagogique et son logiciel de programmation. Les autres artefacts identifiés sont propres à l’enseignement (la pédagogique mise en place et le curriculum scolaire) et à l’environnement physique de l’enseignant (espace physique de la classe). Les études de Sullivan et al. (2015) ont aussi souligné la pertinence de considérer les outils dans la conception des tâches. En fait, comme le mentionne l’étude de Sullivan et al. (2015), il n’est pas possible de séparer la conception de la tâche de la pédagogie de l’enseignant. Selon ces auteurs, la prise de décision concernant la pédagogie à implémenter constitue un élément central dans la conception de la tâche. En effet, en fonction de la pédagogie que le concepteur prévoit de mettre en œuvre, il va anticiper la réaction des élèves relative à la tâche. L’étude de Tissenbaum et al. (2012) mentionne la pertinence de considérer les caractéristiques de l’environnement de la classe. En fait, l’environnement de la classe peut encourager les interactions entre les élèves, notamment par l’organisation de l’espace et des outils pédagogiques tels que des tables, la présence d’écrans ou d’autres technologies visant à faciliter l’orchestration de l’activité. Les résultats de cette étude, en plus d’être en accord avec celles de Sullivan et al. (2015) et de Tissenbaum et al. (2012), soulignent qu’il n’est pas non plus possible de séparer la conception d’une tâche de robotique pédagogique du robot pédagogique et du curriculum scolaire, dans le cadre de la résolution collaborative de problèmes.
Les résultats de cette étude ont permis de définir les deux règles que sont le travail d’équipe et la durée de l’activité. Par définition, la résolution collaborative de problèmes implique que plusieurs personnes doivent travailler ensemble pour proposer des solutions (Hesse et al., 2015; OCDE, 2013; Zhang et al., 2022). Ainsi, les résultats de cette étude ont souligné la pertinence de considérer l’organisation de la classe en équipe. En particulier, il s’agit de déterminer le nombre d’équipes, la structuration de chacune d’elles et le rôle de chaque élève dans celles-ci, qui pourraient dépendre de la complexité de la tâche. Ces résultats corroborent ceux de l’étude menée par Hall (2014). Cette dernière met l’accent sur le fait que les rôles doivent être clairement définis pour offrir aux élèves la possibilité de permuter durant la réalisation de la tâche.
La durée prévue pour la réalisation de la tâche est un facteur pertinent pour permettre le développement de la résolution collaborative de problèmes par les élèves. Ainsi, lors de la conception de la tâche, en plus de considérer cette durée, il faudrait prévoir la durée de gestion et d’installation du matériel.
Les résultats de cette étude soulignent que deux caractéristiques des élèves sont à considérer : leur zone proximale de développement et leur intérêt vis-à-vis de la tâche. Ces résultats sont en accord avec ceux des travaux de Watson et Ohtani (2015). Toutefois, il n’est pas aisé pour les enseignants d’évaluer la zone proximale de développement de chaque élève. Ceci est encore plus difficile pour les conseillers pédagogiques qui conçoivent des tâches qui ne sont pas destinées à des élèves en particulier.
L’objectif de cette étude était de définir les facteurs influençant la conception des tâches de robotique pédagogique visant le développement de la compétence de résolution collaborative de problèmes chez les élèves du primaire.
Cette étude a mis au jour plusieurs facteurs influençant la conception d’une tâche de robotique pédagogique, notamment les habiletés technologiques et pédagogiques du concepteur, les caractéristiques des robots et logiciels utilisés, la pédagogie prévue, ainsi que les spécificités des élèves ciblés par la tâche. Toute comme l’étude de Sullivan et al. (2015) qui a été réalisée dans le cadre de la conception des tâches de mathématique, notre étude souligne que la conception d’une tâche de robotique pédagogique visant la résolution collaborative de problèmes est multidimensionnelle. Les résultats de cette étude nous amènent à recommander une co-conception de tâche de robotique pédagogique impliquant personnes enseignantes et personnes conseillères pédagogiques pour améliorer la qualité des tâches qui visent à développer la résolution collaborative de problèmes chez les élèves du primaire. En fait, les personnes enseignantes possèdent une meilleure connaissance des spécificités de leurs élèves, de leurs besoins et des contraintes réelles en classe alors que les conseillères pédagogiques apportent une vision plus large des stratégies pédagogiques de mobilisation des robots en classe.
La principale limite de cette étude est le nombre limité des participants et dans le fait qu’elle repose sur les pratiques déclarées par ces derniers. Toutefois, cette étude ouvre de nouvelles perspectives de recherche en suggérant de mobiliser des approches telles que l’observation directe des participants pendant la conception des tâches de robotique pédagogique. Il serait également pertinent d’explorer l’effet de la co-conception des tâches par des binômes personne enseignante/personne conseillère pédagogique sur la qualité et l’efficacité de la résolution collaborative de problèmes.
Atman Uslu, N., Yavuz, G. Ö., & Koçak Usluel, Y. (2022). A systematic review study on educational robotics and robots. Interactive Learning Environments, 1-25. https://doi.org/10.1080/10494820.2021.2023890
Avry, S., Chanel, G., Betrancourt, M., & Molinari, G. (2018). Effet des antécédents émotionnels de contrôle et de valeur sur la résolution de problème dans un jeu vidéo collaboratif. Revue des sciences et techniques de l’information et de la communication pour l’éducation et la formation, 25(1). https://doi.org/10.23709/STICEF.25.1.3
Barma, S. (2008). Un contexte de renouvellement de pratiques en éducation aux sciences et aux technologies : une étude de cas réalisée sous l’angle de la théorie de l’activité [thèse]. Université Laval. http://hdl.handle.net/20.500.11794/20215
Bergner, Y., Andrews, J. J., Zhu, M., & Gonzales, J. E. (2016). Agent-based modeling of collaborative problem solving : Agent-based modeling of collaborative problem solving. ETS Research Report Series, 2016(2), 1-14. https://doi.org/10.1002/ets2.12113
Care, E., Griffin, P., Scoular, C., Awwal, N., & Zoanetti, N. (2015). Collaborative problem solving tasks. Dans P. Griffin et E. Care (dir.), Assessment and teaching of 21st century skills (pp. 85-104). Springer Netherlands. https://doi.org/10.1007/978-94-017-9395-7_4
Cevikbas, M., & Kaiser, G. (2021). A systematic review on task design in dynamic and interactive mathematics learning environments (DIMLEs). Mathematics, 9(4), 399. https://doi.org/10.3390/math9040399
Chen, G., Shen, J., Barth-Cohen, L., Jiang, S., Huang, X., & Eltoukhy, M. (2017). Assessing elementary students’ computational thinking in everyday reasoning and robotics programming. Computers & Education, 109, 162-175. https://doi.org/10.1016/j.compedu.2017.03.001
De Hei, M. S. A., Sjoer, E., Admiraal, W., & Strijbos, J.-W. (2016). Teacher educators’ design and implementation of group learning activities. Educational Studies, 42(4), 394-409. https://doi.org/10.1080/03055698.2016.1206461
DeVane, B., & Squire, K. D. (2012). Activity theory in the learning technologies. Dans Theoretical foundations of learning environments (2e éd., pp. 242-267). Routledge. https://www.taylorfrancis.com/chapters/edit/10.4324/9780203813799-12/activity-theory-learning-technologies-benjamin-devane-kurt-squire
Dindar, M., Järvelä, S., Nguyen, A., Haataja, E., & Çini, A. (2022). Detecting shared physiological arousal events in collaborative problem solving. Contemporary Educational Psychology, 69, 102050. https://doi.org/10.1016/j.cedpsych.2022.102050
Engeström, Y. (1987). Learning by expanding: An activity-theoretical approach to developmental research. https://lchc.ucsd.edu/mca/Paper/Engestrom/Learning-by-Expanding.pdf
Engeström, Y. (1999). Activity theory and individual and social transformation. Dans Y. Engeström, R. Miettinen et R.-L. Punamäki-Gitai (dir.), Perspectives on activity theory (pp. 19-38). Cambridge University Press.
Engeström, Y., & Pyörälä, E. (2021). Using activity theory to transform medical work and learning. Medical Teacher, 43(1), 7-13. https://doi.org/10.1080/0142159X.2020.1795105
Graesser, A., Fiore, S. M., Greiff, S., Andrews-Todd, J., Foltz, P. W., & Hesse, F. W. (2018). Advancing the science of collaborative problem solving. Psychological Science in the Public Interest, 19(2), 59-92. https://doi.org/10.1177/1529100618808244
Graesser, A., Kuo, B.-C., & Liao, C.-H. (2017). Complex problem solving in assessments of collaborative problem solving. Journal of Intelligence, 5(2), 10. https://doi.org/10.3390/jintelligence5020010
Hall, B. M. (2014). Designing collaborative activities to promote understanding and problem-solving. International Journal of e-Collaboration, 10(2), 55-71.
Hesse, F., Care, E., Buder, J., Sassenberg, K., & Griffin, P. (2015). A framework for teachable collaborative problem solving skills. Dans P. Griffin et E. Care (dir.), Assessment and teaching of 21st century skills (pp. 37-56). Springer Netherlands. https://doi.org/10.1007/978-94-017-9395-7_2
Kamga, R. (2019). Analyse de la compétence de résolution collaborative de problèmes des futur(e)s enseignant(e)s de l’enseignement primaire. Université Laval. https://corpus.ulaval.ca/jspui/handle/20.500.11794/36794
Kamga, R., Romero, M., Komis, V., & Mirsili, A. (2017). Design requirements for educational robotics activities for sustaining collaborative problem solving. Dans D. Alimisis, M. Moro et E. Menegatti (dir.), Educational robotics in the makers era (vol. 560, pp. 225-228). Springer International Publishing. https://doi.org/10.1007/978-3-319-55553-9_18
Kolfschoten, G., French, S., & Brazier, F. (2014). A discussion of the cognitive load in collaborative problem-solving: The decision-making phase. EURO Journal on Decision Processes, 2(3-4), 257-280. https://doi.org/10.1007/s40070-014-0034-9
L’Écuyer, R. (1990). Méthodologie de l’analyse développementale de contenu. Méthode GPS et concept de soi. Presses de l’Université du Québec. http://www.deslibris.ca/ID/422680
Leroy, A., & Romero, M. (2022). Creative intention and persistence in educational robotic. Educational Technology Research and Development, 70. https://doi.org/10.1007/s11423-022-10128-6
Nieminen, J. H., Chan, M. C. E., & Clarke, D. (2022). What affordances do open-ended real-life tasks offer for sharing student agency in collaborative problem-solving? Educational Studies in Mathematics, 109(1), 115-136. https://doi.org/10.1007/s10649-021-10074-9
OCDE. (2013). Pisa 2015: draft collaborative problem solving framework. Organization for Economic Cooperation & Development. https://www.oecd.org/pisa/pisaproducts/Draft%20PISA%202015%20Collaborative%20Problem%20Solving%20Framework%20.pdf
Oliver, M., & Higgins, S. (2023). Exploring task design to promote discipline-specific reasoning in primary English. Thinking Skills and Creativity, 47, 101230. https://doi.org/10.1016/j.tsc.2022.101230
Papadakis, S., & Kalogiannakis, M. (2022). Learning computational thinking development in young children with bee-bot educational robotics. Dans I. R. Management Association (dir.), Research anthology on computational thinking, programming, and robotics in the classroom (pp. 926-947). IGI Global. https://doi.org/10.4018/978-1-6684-2411-7.ch040
Papert, S. (1980). Turtle geometry: A mathematics made for learning. Dans Mindstorms. Children, computers and powerful ideas (pp. 55-94). Basic Books. http://worrydream.com/refs/Papert%20-%20Mindstorms%201st%20ed.pdf
Rojas, M., Nussbaum, M., Chiuminatto, P., Guerrero, O., Greiff, S., Krieger, F., & Van Der Westhuizen, L. (2021). Assessing collaborative problem-solving skills among elementary school students. Computers & Education, 175, 104313. https://doi.org/10.1016/j.compedu.2021.104313
Romero, M., & DeBlois, L. (2022). Analyse du processus de construction de connaissances dans des activités de programmation à l’école. Canadian Journal of Science, Mathematics and Technology Education, 22(2), 405-421. https://doi.org/10.1007/s42330-022-00210-9
Sannino, A. (2015). The emergence of transformative agency and double stimulation: Activity-based studies in the Vygotskian tradition. Learning, Culture and Social Interaction, 4, 1-3. https://doi.org/10.1016/j.lcsi.2014.07.001
Siddiq, F., & Scherer, R. (2017). Revealing the processes of students’ interaction with a novel collaborative problem solving task: An in-depth analysis of think-aloud protocols. Computers in Human Behavior, 76, 509-525. https://doi.org/10.1016/j.chb.2017.08.007
Socratous, C., & Ioannou, A. (2022). Evaluating the impact of the curriculum structure on group metacognition during collaborative problem-solving using educational robotics. TechTrends, 66. https://doi.org/10.1007/s11528-022-00738-5
Song, Y. (2018). Improving primary students’ collaborative problem solving competency in project-based science learning with productive failure instructional design in a seamless learning environment. Educational Technology Research and Development, 66(4), 979-1008. https://doi.org/10.1007/s11423-018-9600-3
Sullivan, P., Knott, L., & Yang, Y. (2015). The relationships between task design, anticipated pedagogies, and student learning. Task design in mathematics education. An ICMI Study 22, (pp. 8-114). Springer Nature.
Taylor, K., & Baek, Y. (2018). Collaborative robotics, more than just working in groups. Journal of Educational Computing Research, 56(7), 979-1004. https://doi.org/10.1177/0735633117731382
Tissenbaum, M., Lui, M., & Slotta, J. (2012). Co-designing collaborative smart classroom curriculum for secondary school science. Journal of Universal Computer Science, 18(3), 327-352.
Unal, E., & Cakir, H. (2021). The effect of technology-supported collaborative problem solving method on students’ achievement and engagement. Education and Information Technologies, 26(4), 4127-4150. https://doi.org/10.1007/s10639-021-10463-w
Warneken, F., Steinwender, J., Hamann, K., & Tomasello, M. (2014). Young children’s planning in a collaborative problem-solving task. Cognitive Development, 31, 48-58. https://doi.org/10.1016/j.cogdev.2014.02.003
Watson, A. & Ohtani, M. (2015). Task design in mathematics education. An ICMI Study 22. Springer Nature.
Yin, K. Y., Abdullah, A. G. K., & Alazidiyeen, N. J. (2011). Collaborative problem solving methods towards critical thinking. International Education Studies, 4(2), 58-62. https://doi.org/10.5539/ies.v4n2p58
Zhang, S., Gao, Q., Sun, M., Cai, Z., Li, H., Tang, Y., & Liu, Q. (2022). Understanding student teachers’ collaborative problem solving: Insights from an epistemic network analysis (ENA). Computers & Education, 183, 104485. https://doi.org/10.1016/j.compedu.2022.104485
Raoul Kamga est professeur au département de didactique de l’Université du Québec à Montréal, Canada. Il détient un doctorat en technologie éducative et est coresponsable du groupe de recherche sur le numérique en éducation (ENUMED). Ses domaines d’expertise incluent l’intelligence artificielle en éducation, la résolution collaborative de problèmes et la robotique pédagogique. Courriel : kamga_kouamkam.raoul@uqam.ca
Sylvie Barma, professeure titulaire à l’Université Laval, Canada, se focalise sur les enseignants cherchant à innover dans leur pratique. Elle a dirigé le Centre de recherche sur la réussite scolaire et a été professeure invitée dans diverses universités mondiales. Elle a mené ses recherches en innovation éducative dans une perspective socioculturelle. Courriel : Sylvie.Barma@fse.ulaval.ca
Frédéric Fournier est professeur au département de didactique de l’Université du Québec à Montréal, Canada. Il a enseigné des cours sur le design d’activités numériques innovantes et sur l’apprentissage en laboratoire de sciences et technologie. Ses recherches portent sur la didactique des sciences, en s’appuyant notamment sur les laboratoires créatifs et la robotique pédagogique. Courriel : fournier.frederic@uqam.ca
Pierre Lachance a été enseignant de sciences au secondaire. Il est désormais une personne-ressource au service national du Réseau Éducation Collaboration Innovation et Technologie, où il accompagne les enseignants de sciences dans l’intégration pédagogique du numérique, en leur proposant des formations en présence ou à distance. Courriel : pierre.lachance@recit.qc.ca
Joelle Bérubé-Daigneault, titulaire d’une maîtrise en éducation et d’un baccalauréat en études littéraires, enseigne le français au secondaire. Dynamique et créative, elle transmet sa passion de l’apprentissage à ses élèves. Curieuse de voyages et d’éducation, elle a enseigné en Afrique du Sud et explore l'usage du numérique en éducation. Courriel : berube-daigneault.joelle@uqam.ca
Sarah Cool-Charest a fait une maîtrise en éducation, option éducation préscolaire et enseignement primaire, à l’Université de Montréal, Canada. Auparavant, elle a suivi des études supérieures en études littéraires ainsi qu’en enseignement du français, langue première, au secondaire, à l’UQAM. Courriel : sarah.cool.charest@umontreal.ca